
Robots That Walk: What the Challenge of Locomotion Says About Next-Generation Manufacturing
CHRISTIAN HUBICKI
Florida A&M University–Florida State University (FAMU-FSU)
College of Enginering
Why study walking and running robots, and bipedal robots in particular? Because robots can go where people can’t or shouldn’t go because it isn’t safe, such as malfunctioning nuclear power plants, or the staircases and corridors of burning buildings—places designed to be navigated by bipedal humans.
In addition to disaster response and exploration applications, the study of bipedal robotics informs the design and control of assistive devices. Robotic prosthetic legs and exoskeletons can enable walking and running for patients who have lost the ability to do so, or perhaps even superhuman performance (e.g., lifting or conveying immensely heavy loads).
More broadly, the challenge of engineering bipedal robots yields general lessons across autonomy-related fields including manufacturing. While manufacturing has excelled in extreme repeatability of its processes in controlled environments (famously measuring quality in “sigmas”), legged robotics grapple with uncontrolled environments. If manufacturing is to push its capabilities or venture into remote and uncontrolled locations, it may be beneficial to learn from the field of legged robotics.
This paper summarizes four lessons that were essential to recent advances in walking and running robots and illustrates how they can be applied to manufacturing.
- Bipedal roboticists have designed robots with underactuation and compliance for improved agility and efficiency, and automated manufacturing facilities can similarly lower capital and energy costs.
- Walking and running controllers are being designed for robustness to unknown terrain, and manufacturing can use similar robust control to operate on parts of unknown shape and softness.
- Locomoting robots that rely on self-stable and emergent behaviors provide an example of decreased reliance on heavy computation and ways to find surprising effective behaviors not programmed by their control engineers.
- And finally, the need to change locomotion behaviors on the fly—for example, to change speeds or tasks—has driven the development of task-flexible control algorithms that can make robots more versatile (e.g., for tasks like carrying packages).
UNDERACTUATION AND COMPLIANCE
Legged robots have made enormous strides in terms of agility and stability—Boston Dynamics’ Atlas (figure 1) can do backflips—but energy economy is a longstanding challenge in legged robotics. Humanoid robots typically require an order of magnitude more energy to walk than an equivalently sized person. This drastically limits the range that robots can travel on a limited energy supply, pushing legged roboticists to find ways to do more with less energy.
One efficiency-driven approach, underactuation, involves building bipedal robots with fewer motors, forcing the controller to do the same task using less power. Underactuation can also reduce robot weight as well as stiffness due to highly geared drive transmissions. These combined improvements often lead to increased efficiency: A simple underactuated walker called the Cornell Ranger was able to walk 40 miles on a single battery charge.1
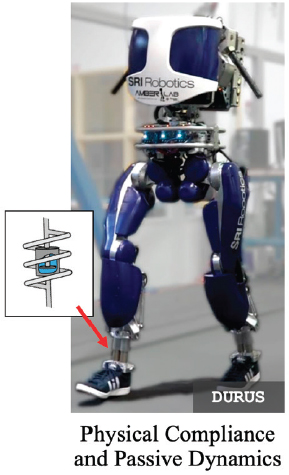
Another approach to increased efficiency comes in the form of compliance, or elasticity in the robot. Robots traditionally are built with highly rigid bodies, in part to make control algorithms simpler. Humans, however, have elastic tendons in their legs that can store and return energy otherwise lost to heat while walking. Following this example, robots like DURUS (figure 2) have spring-legged feet that reduce the energy cost of locomotion by 70 percent over previous humanoid robots (Hereid et al. 2018).
For the field of manufacturing, assembly-line manipulators may save on energy costs by omitting actuators and including flexible linkages.
ROBUSTNESS TO UNKNOWN TERRAIN
The terrain of the outside world is messy. Not only can it be uneven or rocky, it can be soft like soil, sand, or snow. This means that vision alone cannot always reveal all the necessary properties of oncoming terrain to inform control. Real-world environments call for robots that are robust to unknown terrain. Figure 1
___________________
1 Reported by PI Andy Ruina (http://ruina.tam.cornell.edu/research/topics/locomotion_and_robotics/ranger/Ranger2011/).
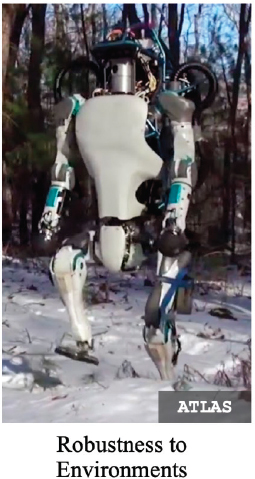
shows the Atlas humanoid from Boston Dynamics walking over a snow bank, an effective example of terrain robustness.
This need for terrain robustness led researchers to develop force control techniques for locomotion: if a user controls a robot leg to produce a specified force, it has a vastly different behavior in response to disturbances than if its position is controlled. If a force-controlled leg steps in a soft patch of earth, the force controller automatically pushes the leg harder into the ground to hold up its weight, instead of stumbling from the unexpected terrain. This allows legged robots to travel on all kinds of terrain without falling, including the Cassie biped (Agility Robotics) and the MIT Cheetah, both of which can walk up slopes and stairs that they can’t even “see.”
In the context of manufacturing, force control is a useful mode for sensitive manipulation using robotic arms. A force-controlled end effector can grip and move an object of unknown geometry or softness, thereby decreasing sensitivity to unknowns in manufacturing.
SELF-STABLE AND EMERGENT CONTROL BEHAVIORS
Roboticists have given a lot of thought to a key question about effective control: What quantities need to be controlled—the position of a robot’s legs, the orientation of its torso, the forces at its feet? All of these options have been useful in different applications of the field of legged robotics. The right choice of control target can lead to self-stable and emergent behaviors that are far more capable than their programming was predicted to accomplish.
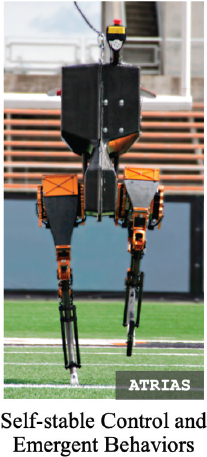
The bipedal robot ATRIAS (figure 3) was programmed with a selfs-tabilizing walking controller that systematically cycles its feet and controls its forward speed without needing elaborate computation to maintain balance. Further, when commanded to speed up using this relatively simple controller, the robot did something unexpected—it started running without being explicitly commanded to do so (Hubicki et al. 2018). Imagine how this emergent behavior might manifest in an automated factory: In a task where one robotic arm must transfer a part to another robotic arm, if commanded to transfer faster, it might toss the part to the other. With emergent control behavior, a factory can be inherently more clever and effective than initially imagined by its engineers.
TASK-FLEXIBLE CONTROL ALGORITHMS
The locomotive robotics field has pushed for not only more stable, faster, and more efficient locomotion but also a variety of walking and running behaviors. How does a robot jump over an obstacle, run around a corner, or walk with a fragile object? Preprogramming each task with its own human-derived controller quickly becomes impractical. Consequently, achieving a task-flexible control framework has become a critical push for practical viability.
The push for task flexibility has led to a proliferation of real-time optimization methods to generate stable controllers on the fly for a given task. One method is model-predictive control (MPC), where easy-to-compute optimizations are solved extremely quickly and the solutions form a plan for the controller to complete its task in a specified timeframe. The key benefit of MPC is the ability to appropriately react to disturbances, which are myriad out in the field. If an obstacle appears or the goal suddenly changes, fast optimization enables responsive replanning.
This task flexibility made MPC and similar optimization-based methods popular approaches for the vaunted DARPA Robotics Challenge in 2015. Teams at this challenge were tasked with building a robot that would respond to a simulated industrial disaster. They needed to control a robot to drive a car to the site, exit the vehicle, open a building door, walk over rubble, climb a staircase, shut off a valve, and drill a hole in a wall—all with minimal human supervision on site. The teams succeeded in formulating optimizations that could handle the complexity of robots with dozens of degrees of freedom, solved hundreds of times per second.
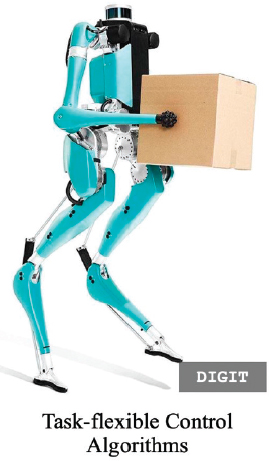
The emergence of these planning algorithms enabled the next generation of versatile legged robots, including prototypes for package delivery with Agility Robotics’ Digit robot (figure 4). Future manufacturing may need such real-time task flexibility as well: If a robot performing one specialized task malfunctions, another robot not designed explicitly for the role could be adapted to replace it.
CONCLUSION
Legged robots have had to make a number of advances in order to move out in the real world. Many of these approaches have straightforward extensions to the needs of improved manufacturing. At the same time, legged robots would benefit from the reliability of modern manufacturing processes. And there are lessons that human legs can take from factory robots, too. Ideally, manufacturing assembly lines of the future will be as robust and adaptable as human walking,
and conversely, the reliability of walking robots will be measured in “sigmas,” like manufactured products.
REFERENCES
Hereid A, Hubicki CM, Cousineau EA, Ames AD. 2018. Dynamic humanoid locomotion: A scalable formulation for HZD gait optimization. IEEE Transactions on Robotics 34(2):370–87.
Hubicki C, Abate A, Clary P, Rezazadeh S, Jones M, Peekema A, Van Why J, Domres R, Wu A, Martin W, and 2 others. 2018. Walking and running with passive compliance: Lessons from engineering—A live demonstration of the ATRIAS biped. IEEE Robotics & Automation 25(3):23–39.






