
3
Vital National Needs
Undersea vehicles have evolved into important tools for investigating the deep ocean and managing its resources. In their versatility and their power, these vehicles can be compared, perhaps, with satellites, although they operate in a vastly different realm. Like satellites, they expand the scope of human observation. A large fraction of the boundaries of the Earth's crustal plates are in the deep ocean and directly observable only by using undersea vehicles. Undersea vehicles give us access to vital information on our environment. Like satellites, they offer new perspectives and enable new tasks. They may even be the basis of entire new industries, such as subsea mining. The results of the first undersea explorations have fired scientists, engineers, and entrepreneurs with the universal desire to know more, to explore further, to extend the human reach. This chapter reviews some of the potential of those explorations for furthering the national interests in a range of scientific, regulatory, military, and industrial fields.
To illustrate these potential contributions, the committee has included the four focal projects shown in Table 3-1—technology development and integration projects that could lead to new applications of undersea vehicles in support of national objectives:
-
synoptic observation system
-
blue water oceanographic sections and hydrographic surveys
-
subsea oil field inspection and intervention
-
search and survey
The projects would make possible tasks heretofore unachievable or impractical but of obvious value to society. Some tasks rely on technology that is available and economically feasible today; others are more visionary. Each uses technologies of value to a wide range of undersea vehicle applications to meet commercial, military, and scientific needs. The committee has not ranked the projects as to priority. Many of these new primary applications would use existing technology for subsystems but would combine them in new and different ways. Some would be appropriate government missions, others would be led by the private sector. Certainly they do not exhaust the potential for innovative uses of undersea vehicles, nor are they intended as a representative sample of potential applications; they simply offer a few challenging examples.
All of the focal projects use AUVs as their primary vehicles. In the committee's judgment AUVs promise more payoff in advanced capabilities than DSVs or ROVs, which are technologically relatively mature. At the same time, DSVs and ROVs could be used in a variety of functions in these projects, not only in surveying and construction, but also as alternatives to AUVs in some missions.
SCIENTIFIC UNDERSTANDING AND APPLICATIONS
Many of the most important questions humankind can ask are problems of ocean science that require exploration of the little known world beneath the surface: fundamental questions about the Earth's history; vital questions about the future of the human environment; and technical and economic questions. Nearly all marine activities require some scientific understanding of the ocean. Seagoing people have always charted the currents and depths and marked the migration seasons of edible fish. Over the centuries, these practical observations took on the character of true science. Modern oceanographic investigation is much more recent; the voyage of Challenger in the 1870s marked the first global-scale scientific cruise. The data gathered during its 3.5-year excursion filled dozens of volumes. Progress in oceanography has always been limited by access beneath the sea surface, and advances have depended on improvements in data-gathering tools and techniques. The emerging capabilities of undersea vehicles have made visible facts and relationships that are changing our central ideas about the oceans, their uses, and life on Earth.
TABLE 3-1 Focal Projects: Responses to National Needs
|
Focal Project |
Opportunity |
Vehicle |
Key Development Concerns |
Technology Maturity |
|
Synoptic Observation System |
Science Sensing fine gradients over fixed areas, long-term Climate change |
AUVs, with central "garage" station |
Homing and docking; data transfer between subsystems |
Component technologies available; no system experience |
|
|
Industry Measuring ocean environmental change |
|
|
|
|
Blue Water Oceanographic Sections and Hydrographic Surveys |
Science Sensing oceanographic gradients, extending range and accuracy of surface-supported surveys |
AUVs |
Positioning accuracy; integration of sensors, navigation, and control systems |
Basic technology and subsystems available; systems integration needed |
|
Subsea Oil field Inspection and Intervention |
Industry Reducing or eliminating dependence on surface support for subsea operations, maintenance, and inspection |
AUVs |
Integration of sensors, navigation, and control systems |
Technology available; key components in development |
|
Search and Survey |
Science Initial surveys for oceanographic research |
AUVs |
Batteries with higher energy density; control; data storage and processing |
Technology available for most key components |
|
|
Industry Search and recovery of high-value objects Initial surveys for minerals |
|
|
|
Plate Tectonics
In the past several decades, undersea vehicles have contributed to profound discoveries in the Earth and life sciences that have emerged from human exploration of the seafloor. Science has described and verified processes of plate tectonics, consisting of continental drift and seafloor spreading resulting from the motion of the Earth's crust, which is driven by the slow, convective circulation of the molten interior. The distribution of continents—with their earthquakes, volcanoes, and mineral deposits—stems from these motions. The continental drift hypothesis was advanced in the last century by Alfred Wegener. This and the more recent concept of seafloor spreading have been confirmed by amassing and synthesizing large amounts of data from shipboard acoustic depth finders, marine gravimeters, magnetometers, deep sea dredges, and corers. In the 1980s, undersea vehicles gave researchers close-up views of hydrothermal vents, and cold seeps were discovered on the seafloor near tectonic ridges and faults, with their remarkable animal communities. These discoveries offer important fundamental insights into the functioning of the planet. They also have practical strategic and economic benefits, helping us determine the locations of important resources and protect ourselves from earthquakes and volcanic activity.
A central tenet of plate tectonics is that most geologic interactions occur in a small number of narrow, highly dynamic zones where the edges of large plates are in contact. There are three types of plate boundaries: deep ocean trenches, spreading centers or mid-ocean ridges, and transform faults. To understand key processes of our planet, including volcanism, earthquake patterns, and the formation of resource deposits, scientists must understand the processes occurring along these plate margins. With few exceptions, these active plate sutures lie beneath some portion of the ocean. A small percentage of these plate boundaries has been acoustically mapped from surface ships. 1 However, fundamental understanding of the processes along the three plate boundary types requires direct access, which can be accomplished only by undersea vehicles. Direct access is required for recovering geological cores, making in situ measurements of magnetics or temperature, taking close-up photos, and a host of other tasks.
Deep Ocean Trenches
At the boundaries between oceanic plates and the continental plates, where tectonic motions compress the crustal materials together, the linked processes of lithospheric subduction and mountain building occur. It is along these lines of collision that the deepest places in the ocean are found. In the Pacific Ocean, this line forms an arc that runs from the tip of South America to the Aleutians, past Japan, and down to New Zealand, known as the "ring of fire" because of the prevalence there of volcanoes and earthquakes.
The deep ocean trenches are the least explored regions of the Earth. Even the Moon is better mapped and understood than these remote, hostile areas. Yet, because the trenches are the products of lithospheric subduction, one suspects there is much to be learned from probing them. Our experiences during the relatively recent investigations of oceanic spreading centers on the seafloor, with their hydrothermal vents and completely unsuspected thermophylic and chemosynthetic life forms, urges scientific exploration, surveying, and hypothesis-testing in the deep ocean trenches. Certainly that there is much to be learned. But the mechanical means for doing so are at present limited to towed sleds and a single Japanese ROV (Kaiko). Further development of undersea vehicles could extend the reach of these tools.
The deepest trenches—cold, dark, and under enormous pressures (1,100 atmospheres at the bottom of the 11-kilometer-deep Mariana Trench)—have only been penetrated twice, by Piccard and Walsh in the bathyscaphe Trieste in 1960 (Piccard and Dietz, 1960) and by the Japanese ROV Kaiko in 1995. Their observations at the bottom of the Mariana Trench show the presence of life, ocean currents near the bottom, and deep sediments of biological detritus from the water column above. The sediments in the trenches represent a loss of carbon-bearing biological materials from the near-surface region; the sediments are an important sink for the removal of carbon dioxide from the atmosphere, as explained in the discussions on global warming and the carbon cycle later in this chapter. More observations will be made during later excursions of Kaiko, but that vehicle's limitation of mobility (owing to its long tether cable) will preclude any but the most preliminary exploration. Nevertheless, Kaiko and its companion, the DSV Shinkai (depth range 6,500 meters, with plans to increase this range), will be valuable assets in helping scientists identify new objectives that can be probed by more capable vessels carrying sensors, samplers, and instrumentation.
Scientific questions that come to mind span the entire expanse of ocean science. In geology and geophysics, they include: What is the heat flow-out of the bottom in these regions of high-friction lithospheric consumption? What are the levels and patterns of seismic activity? What gravity anomalies result as lighter crust is thrust downward beneath the continental margins, and what do they imply about the distribution of rock beneath the seafloor? What is the rock magnetism there, and how does it compare with the magnetism found closer to spreading centers? How rapidly are sediments accumulated from the debris of the overlying water column? Do the sediments slump into the trenches, partially filling them in (and thereby offering potentially attractive sites for seabed disposal of undesirable materials, via human-induced sediment slumps that would quickly cover over such materials)? In physical oceanography one asks: What are the currents and the temperature and salinity structures in the trench regions? Is thermally driven convection occurring in the water column? How much communication occurs with surrounding waters, especially the deep waters produced elsewhere by thermohaline processes? In chemistry, we wonder: What are the concentrations of trace materials in these areas of unusual geochemistry and hydrodynamics? In biology: What kinds of life forms exist there? Where do they derive their supplies of nutrients and energy? Are there opportunities for biotechnological developments? The answers to these questions are sure to be surprising and produce new targets for research.
A joint of international exploratory scientific program with the JAMSTEC, using Kaiko and Shinkai, could gather the information needed to formulate more precise scientific questions. In the meantime, preliminary design work for a deepest-diving vehicle capable of taking instruments and samplers directly to the seafloor could be performed. The design would have to be flexible and include ceramic pressure hulls and various in situ instruments (such as water samplers and temperature, salinity, and pressure sensors), remote sensors (acoustic profilers and mappers, video cameras, and laser scatterometers), geological and geophysical instrumentation (coring devices, small gravimeters, and magnetometers), and biological sampling devices. Although the initial design would likely be an AUV (with or without fiber-optic cable to the surface), ROVs and DSVs could be considered as well (Hawkes and Ballou, 1990). The preliminary design of the vessel and payload could lead to construction of a vehicle to help answer the many more detailed questions that would arise from the Japanese-U.S. program.
The profoundly different life forms found at the much shallower hydrothermal vents near tectonic ridges (discussed later in this chapter) allow the inference that the trenches also are likely to contain novel life forms uniquely adapted to their habitat. These organisms could be the source of new genetic material of interest to both science and industry. It is also conceivable that the trenches could be used for disposal of certain wastes. The combination of very deep sediment accumulations and earthquakes is likely to cause sediment slumps that would bury waste material, which would at the same time be slowly carried into the interior of the Earth by subduction. These possibilities are only conjectures because of the extreme scarcity of information about the trenches. While the trenches are the least explored regions of the Earth's surface, they are among the most active tectonically. If the lessons of discovery in other
regions of the seafloor are any guide, important findings await discovery.
Undersea vehicles are essential in such exploration. Instruments deployed from surface platforms cannot be used; the length and weight of the cables to support such deep probes would require very large cable diameters merely to support their own weight, and enormous winches to handle 11 or 12 kilometers of heavy cable. One of the other platform options for exploration of the deepest depths, the human-occupied, dirigible-like Trieste, became obsolete and was retired in 1982. Now that the ROV Kaiko has reached the deepest ocean, the next step in the expansion of temporal and spatial observation and exploration would appear to be achievable using a deep-diving AUV or DSV equipped with ceramic pressure hulls, sophisticated in situ and remote sensors, and data acquisition and logging capabilities.
Spreading Centers or Midocean Ridges
A system of spreading centers stretches through most of the Earth's major oceans, like the seams on a baseball. Along these boundaries, the ocean floor spreads at rates of 20 km to 200 km per million years, creating new ocean crust. The new crust forms in water depths of about 2,000 to 4,500 meters as molten magma solidifies. In the porous ocean crust, high-temperature magma (1,200¹C), meets near-freezing seawater. The water is heated, becomes buoyant, and carries dissolved minerals up through the crust, where they precipitate on contact with cold water at or near the seafloor. The mineral structures created by this process can form massive mineral deposits through which the hot hydrothermal fluid flows, exiting in dark plumes known as "black smokers." These venting sites and deposits were discovered and explored using a tow sled and an undersea vehicle during the first direct examination of a spreading center. The vents were located with the towsled Angus, and the Angus crew then directed the DSV Alvin to the site (Corliss et al., 1979). In the ensuing 16 years, underwater exploration, using a variety of vehicles, has located over 100 such deposits in all major ocean basins.
The heat and chemicals emitted by these vents sustain diverse chemosynthetic thermophilic microbial populations that form the base of a widely distributed and previously unsuspected food chain that is not based on photosynthesis. Studies of the chemical and energy flows and feedback loops in submarine volcanic systems also raise central concerns of planetary science because conditions at the vents are analogous to the oxygen-poor conditions on the early Earth and on other volcanically active planets. Characterizing them will require mapping the vents and sampling their emissions at a variety of scales, using multisensor survey tools capable of precise, high-resolution mapping. Measuring the variations of the vents with time requires repeatedly deploying, servicing, and recovering instruments in corrosive and hostile environments. Performance of many of these functions will require undersea vehicles.
Recent use of a U.S. Navy sound surveillance system to identify and locate seismic activity associated with diking and eruptive activity on the Juan de Fuca Ridge allowed rapid scientific response to study such an event for the first time ever (Fox, 1995). The ability to respond rapidly (within days) to such events using undersea vehicles will be increasingly attractive to scientists.
Transform Faults
In transform faults, such as the San Andreas Fault, plates slide past one another, without gaining or losing mass, occasionally generating large earthquakes. Undersea vehicles have been used to examine transform faults (Fox and Gallo, 1984). Because the faults are usually deep, steep-walled valleys oriented at high angles to the trends of spreading centers and subduction zones, they offer a rare cutaway view of the adjacent crust. Thorough mapping of the walls of such a fault using either extensive DSV observation time or side-scan sonar sheds light on the stratigraphic record of the volcanic crust adjacent to a ridge crest. Follow-up studies with vehicle-mounted drilling tools could allow major strides in characterizing this geologic history.
Essential vehicle requirements for investigations in transform faults include high-precision mapping in steeply sloping, extremely rugged terrain; precision navigation and platform control on preexisting maps; and innovative sampling strategies involving horizontal drilling techniques applied to near vertical walls.
Geochemical Cycles
One great challenge facing oceanographers over the next few decades will be predicting the ocean's responses to natural and human-induced environmental change, such as climate change and land use changes that affect the coastal oceans. Because the deposition and transport of chemicals in and by the sea affect such processes, observations of the fate and effects of chemical species in the ocean can provide sensitive indicators of global variability. Of special importance is the role of the ocean in the global carbon cycle because of the uptake and release of organic carbon by the sea. As atmospheric carbon dioxide concentrations rise and the potential for climatic warming increases, it becomes essential to know if the oceans sequester or release carbon dioxide and under what conditions they might do either. Vast quantities of carbon are stored in the sea in a variety of forms in sediments and in totally dissolved inorganic carbon. Marine organisms transfer carbon to the ocean bottom. The cycling of carbon in the oceans, and the extent to which the oceans are a net sink for the increased atmospheric carbon dioxide, are far from clear. The role of hydrothermal vents in the carbon cycle is understood only in part.
In some research areas, such as the study of fluids emitted from hydrothermal vents and cold seeps (including oil
seeps), DSVs are essential tools (Edmond and Von Damm, 1979; Von Damm et al., 1985; Guinasso et al., 1994). For chemical oceanographers, the primary advantage of DSVs has been their ability to obtain samples from very precisely chosen locations (e.g., inside a vent orifice or in the nepheloid layers sometimes called "fluff" sediments). Other investigators have also taken advantage of the ability of DSVs to carry out complicated manipulative tasks on the seafloor. Using ROVs or AUVs for such missions would require the development of better depth perception to positioning samplers and very fine navigational and positional control, but it might be worthwhile for reasons of cost, safety, and operational efficiency. In addition, payload capacity will have to be sufficient for a variety of tasks, including obtaining several samples (on the order of 1 liter each) from small vents without entrainment of bottom seawater and deploying, manipulating, and retrieving equipment packages from the bottom. Among the most demanding sampling tasks are sediment coring and the collection of organisms from hydrothermal vents.
In recent years, a variety of vehicles, including benthic landers, have been developed to permit remote operation on the seafloor. Although most of these benthic landers drop to the seabed, land, and collect sediment or remain on the bottom while intermittently sensing or sampling, then return to the surface, they are not self-propelled vehicles according to the definition applied by the committee. However, Rover, a bottom-transecting vehicle device developed by the Scripps Institution of Oceanography, is designed to land on the seafloor, intermittently activate itself, drive to a new spot, collect, sample, and return to the surface on command after deployment as long as a year (Smith, 1995). ROVs have been used to map chemical distributions near a vent (Coale et al., 1991), and an ROV has been used to sample from a vent. These vehicle applications are indicative of the potential of more advanced vehicle systems. To illustrate the potential of AUVs in delineating the fine structure of variations in the ocean waters over time, the committee has developed a focal project on a synoptic observation system, described in Box 3-1.
ROVs and AUVs could improve survey coverage in programs that require monitoring chemical species (for example, carbon dioxide) in areas where weather or ice conditions do not permit the use of surface ships or moorings.
One factor limiting the use of undersea vehicles in chemical oceanography has been the lack of chemical sensors rugged enough for extended deployment. Among the sensors already available are chemical sensor systems, such as electrodes or fiber-optic probes for oxygen or pH, and scanners (submersible chemical analyzers) for nutrients (metals and hydrogen sulfide). Many new and improved sensors capable of long-term deployment are being developed, including sensors for carbon dioxide, oxygen, pH, and other chemicals. The National Research Council recently published a report addressing chemical sensors for ocean carbon-cycle studies (NRC, 1993). It emphasizes the importance of in situ sensors, calibration, and quality control. It also sets priorities for target chemicals and sensor development in the following order:
-
quantifying anthropogenic carbon input (various carbon and carbon dioxide system measurements
-
understanding the biological pump (measuring organic compounds)
-
tracing water masses (CFCs and other tracers)
-
other analyses (Zn, Cu, Al, Pb, Mg and other elements of interest to chemical oceanographers)
Another high-priority is the development of sensors for measuring nutrients. The most useful sensors will be those that can be attached as needed to many types of vehicles.
Dynamics of the Ocean, Atmosphere, and Sea Ice
The ocean plays an exceedingly important role in establishing weather and climate over land and sea alike. In turn, it is profoundly affected by the overlying atmosphere and ice cover, while serving as the flywheel on the coupled system. Within these conjoined geophysical fluids, life has evolved and flourished, with the very habitability of the Earth depending on the sea to an extent not very well appreciated. The tropical oceans are the dominant absorbers of the sun's energy; through complex processes involving evaporation, cloud formation, initiation of winds, rainfall, and the redistribution of solar heat by winds and currents, the air and sea together carry heat, momentum, and moisture from the tropics toward the temperate and polar regions. In the process, they make life as we know it possible.
Understanding these overarching global processes is the business of physical oceanography and atmospheric physics. The general circulation of the ocean and atmosphere is a complex phenomenon spanning the planet and is one that requires diverse measurements over large and small scales alike. But measurement alone is not enough. The elucidation of the many physical, chemical, and biological processes involved requires an understanding of the mechanisms at work, their successful theoretical descriptions, and their incorporation into large-scale numerical models that are capable of predicting the state of the air and sea. This is the business of weather and ocean forecasting.
Because of the enormous extent of the sea, oceanography has always been a data-starved science, and marine scientists have resorted to a variety of means to garner information. The classic approach is to use sensors and samplers lowered from a ship to measure at depths such properties as temperature, salinity, pressure, and chemical substances along routes at sea termed "oceanographic sections." More recently, indirect sensors, such as fluorometers and transmissometers, have been added to the research ship's suite of subsurface instrumentation. Other techniques include mooring current meters, thermistors, pressure gauges, and other
|
BOX 3-1 Focal Project 1: Synoptic Observation System Opportunity. Advances in understanding and modeling submarine volcanic or oceanic processes have brought requirements for fine-scale temporal and spatial measurements of various parameters in large, defined regions. Modeling also often requires knowledge of higher-order derivatives of parameter gradients, which places further demands on the resolution and frequency of measurements. Current capabilities for sampling broad areas synoptically are largely non-existent, but those capabilities would be of significant use to industrial, scientific, and even military interests in measuring and characterizing specific ocean and seafloor volumes. Sensors for making these measurements have improved to the point that, for most applications, they are no longer a major limitation; rather, the restricting element is the platform necessary for sensors or sensor data transport. Objective. Provide a method of sensing synoptically fine-scale gradients in the water column or seafloor over wide areas (several hundred km2) and long-term (up to several years), and record and transmit these data via ship or satellite relays to the scientist or commercial user without full-time dependence on expensive surface support ship(s) and services. Provide quick-response data acquisition in areas likely to experience rapid changes in geological or biological character. Developments in AUVs and complementary technologies have evolved to the point that the construction of long-term "undersea observatories" is possible. Vehicle System. An "undersea observatory" for synoptic measurements is illustrated below. Such an observatory would consist of a central control base, with a tether mooring to a surface communications buoy and facilities to "garage" one or more AUVs, and several outlying "nodes," each with an array of instrumentation, a record and playback capability, and a cooperative "dock" for mating with the AUV. Either on command or by preset timing, an AUV disconnects from its "garage" at the control base and proceeds to the first preinstalled sensor node, navigating on dead-reckoning until it approaches within the "homing" sector, wherein the AUV repeatedly interrogates the node and elicits vectoring acoustic responses. As the AUV approaches to within finescale range, the node switches to either optical or high-frequency acoustics to guide the vehicle into a docking "socket." Once the vehicle and socket are joined, the node dumps its prerecorded, time-based data into the vehicle on-board recorder through an inductive coupler or optical window and resets its own recorder. The AUV then resets its dead-reckoning navigation system, disengages, and proceeds to the next node, repeating the process until all nodes have been served. After storing all node data, the vehicle returns to the control base, homing and docking in its "garage," where it dumps the stored data to the control base, which sends the information to a land site via a surface buoy and commercial satellite communication such as INMARSAT. Received data can then be directed to specific sites or put on the Internet for broader distribution. During the interval between repeat circuits to the outlying nodes, the vehicle's batteries are recharged, and the on-board computers receive command updates from the land site through the satellite link, the surface buoy, and the communications connection between the garage and the vehicle. In addition to servicing nodal regions, the AUV could carry selected sensors, either providing or augmenting time-based data during transits or, upon command from shore, direct itself to specific areas for rapid reaction surveys of seafloor events detected by the control base instruments or other means. When such an event occurs, a human may assume task-level control of the AUV in near real-time to take immediate advantage of its presence at the scene. Later, as desired, the AUV can be released to resume its preprogrammed rounds. Ongoing advances in acoustic communication will make possible low-cost monitoring of the AUV's location and functions, allowing for quick recovery from failures of autonomous systems. Fiber-optic cables could be used for linking the nodes, with AUVs deployed for time-critical measurements. However, the specified system is more robust and better suited for severe environments such as spreading centers and other seismically active areas. In addition, the technology of housing and docking is important in itself. Use of acoustically linked nodes is another option for some applications covering small areas. Acoustic communications offer greater flexibility for system changes and probably lower cost installation than fiber-optics. Another option is the use of AUVs for sensing between nodes to resolve issues of spatial heterogeneity. This project would also lend itself to the use of multiple low-cost AUVs dispatched according to signals from the field of sensors to make time-critical measurements. |
|
Performance Requirements:
Analysis of State of Technology and Practice. An underwater observatory system would require a number of technologies to act in concert over long periods of time. Many of these technologies have been demonstrated in restricted engineering environments, but a representative network has not yet been assembled and used. The major development concerns for this focal project are the nodal stations—the vehicle homing, docking, and data dumping—and the "home garage" with its surface communications. Nodal station subsystem—This subsystem serves as the primary collection and recording point for all sensors in the surrounding area. The station has to be reliable for long periods of time, perhaps extending to years. The system used for cooperative homing and docking with the vehicle must function flawlessly. Subsystem for vehicle homing, docking, and data pass-through from the node—This subsystem will use new technology that has little or no history. Subsystem components, including optical windows and connectors, are available with some adaptation needed, but significant software development will be required. Garaging subsystem—This subsystem is a major systems integration and reliability challenge. In addition to providing a homing and docking capability similar to that for the data collection nodes, the garage must provide reliable battery-charging, data transfer, and storage capability and a communications component that provides for transfer of collected data to the surface through either acoustic telemetry or a buoy system. Seawater batteries could be used where environmental conditions are favorable (as in the Labrador Sea and many other areas of scientific interest). These batteries are commercially available, and the size would not be a handicap if they were used to power the stationary charging system. Synoptic Observation System 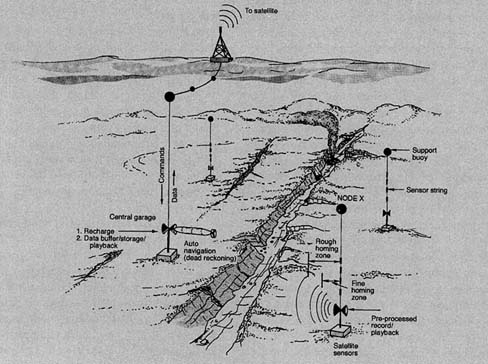 |
instruments to cables anchored on the seafloor to acquire time series of current velocity, temperature, and the like. Drifting buoys, both surface and subsurface, carry instruments and positioning devices that allow them to sample properties while acting as passive tracers for water circulation. In the last two decades, satellite remote sensing has grown to prominence, and its methods give near-global measurements of limited but important surface quantities such as temperature, chlorophyll and sediment concentrations, currents, wave heights, wavelengths, and wind velocity. However, satellite measurements are generally confined to the surface or near-surface of the three-dimensional volume of the sea and therefore can tell little about events going on beneath it. Undersea vehicles can obtain novel, extended, or otherwise unobtainable data on current, density, chemical, or biological composition and other ocean properties. For example, currents may be measured in strong flow at depths beyond the reach of shipborn acoustic Doppler current meters; wave spectrum measurements may be made under storm conditions (when buoys lose their measurement capacity) by sonar observing upward from beneath the waves; and horizontal measurements of many properties may be made simultaneously from the ship and from an AUV running a parallel course at some distance from each other, thereby determining these gradients at constant time.
Examples of using undersea vehicles in support of physical oceanography are numerous. One intriguing application is to use AUVs under the sea ice canopy to gather data otherwise exceedingly difficult to obtain. Since air-sea interchange in the Arctic proceeds through leads and polynyas (openings in the ice), the Arctic Ocean is in poor communication with the atmosphere during the polar winter. Very little is known about polar oceanography under these conditions. The ability to send an AUV under the ice and have it return such important information is a clear application of an undersea vehicle (Curtin et al., 1993). Another application is measuring storm waves by upward-looking sonar on an AUV. Wave-prediction models are exceedingly difficult to calibrate for storm conditions because many of the observations needed for calibration and verification would put humans at risk. In places where there are surface buoys with appropriate sensors (as in the Gulf of Mexico), reliable data can be obtained. However, for most sectors of the oceans, sending AUVs into a hurricane would yield new data and insight on surface wave spectra, bubble generation, wave plunging, and upper-ocean mixing processes under high wind conditions. AUV sonar and imaging devices can provide unprecedented data under otherwise inoperable conditions. Such data are valuable to designers of ships or oil-drilling rigs, for example. A third application is to use semi-autonomous vehicles that drift with subsurface currents but periodically adjust their depth and position to follow some desired criterion of water property.
While the focal project in physical oceanography (see Box 3-2) is perhaps less dramatic than the ones just discussed, it will be of considerable value in terms of both science and economics. Blue water oceanographic sections and hydrographic surveys using undersea vehicles show how the efficiency of such data acquisition from an oceanographic research ship could be doubled or tripled at only incremental costs. In addition, and perhaps more important, using an AUV in conjunction with a surface ship would provide information on gradients in the sea that is not otherwise attainable. Since gradients drive both the hydrodynamics and thermodynamics of the ocean, the AUV would provide increased knowledge of some of the fundamental forces that activate the ocean. Using AUVs would also greatly increase the efficiency of hydrographic surveys. While there is little experience to date in the use of submersibles to support physical oceanography and surveys, the potential is clear and exciting.
Productivity of the Oceans
Productivity is an energy-based measure of the ocean's biological processes. At present, oceanic productivity is best understood at the base of the food chain, where plants fix inorganic carbon into organic compounds using solar energy. Recently scientists have learned that symbiotic bacteria living in the tissues of hydrothermal vent animals are also primary producers, using chemosynthesis rather than photosynthesis. Further up the food chain, scientific understanding decreases. This situation is in part the result of increasing complexity at the higher levels of organization, but it is also the result of limitations of the technology available to study these organisms.
While scientists have been studying oceanic communities for more than a century, the perspective afforded by research vessels at the surface has biased our knowledge substantially. For example, scientists have underestimated the pelagic biomass by as much as one-quarter (Robison, 1995; UNOLS, 1994) because gelatinous animals are destroyed by the collecting nets used to bring them to the surface and because they are invisible to acoustic scans. Recent estimates, based on surveys by undersea vehicles, are beginning to revise our understanding and perceptions about oceanic life processes, but this effort has only begun. Nets and acoustic assessment have also obscured the behavior and ecology of oceanic animals because they cannot reveal their activities in useful detail.
Undersea vehicles have provided scientists and investigators with the tools to begin to solve some of these problems by giving them an in situ perspective. While net tows measure patterns at scales from ten to hundreds of meters in the vertical plane and at kilometer scales in the horizontal plane, direct observations from ROVs and DSVs provide resolution on spatial scales from a centimeter to a kilometer. Recently, ROVs and DSVs equipped with high-resolution video cameras provided effective platforms for this kind of marine exploration in water column depths up to 1,000
meters (Hammer and Robison, 1992; Matsumoto and Harbison, 1993). These techniques have also been applied to comparable studies of bioluminescence (Widder et al., 1989) and marine snow (Pilskaln et al., 1991). With the extension of these studies into deeper water, a large number of undescribed species and "new" ecological relationships are coming to light. Among the ecological features revealed by these measurements are animal associations, habitat partitioning, the role of substrate in spatial distribution patterns, and animal densities. Undersea vehicles allow observation of trophic relationships, physiological rates and processes, activity levels, behavioral patterns, standing stocks, and reproductive patterns (Bailey et al., 1994; Robison, 1995; Adams et al., 1995a). Undersea vehicles can play a major role in forthcoming studies of marine biodiversity (NRC, 1995).
The need to understand the dynamics of marine animal populations and their coupling and the physical and biological processes in their environment is fundamental to the larger issue of how global climate change affects marine systems. One of the U.S. components of the Global Ocean Ecosystem Dynamics study, the Georges Bank program, has focused on studying the population dynamics of four target species of plankton on the Bank (historically one of the world's great fisheries production areas). However, cod and haddock populations have been driven so low by overfishing that these fisheries on Georges Bank are now closed. Integrated surveys of distribution and abundance of the animals, process studies of the predators and prey, and the impact of major physical processes on the biological rates are required. The use of ROVs and AUVs, while limited in the initial stages of this research, holds promise for enhancing the understanding of how individual species exist in their environments on very small scales and the time series changes that take place over periods of months or years.2
On the floor of the ocean, science is making similar progress. In the course of its long career, the DSV Alvin has made a number of fundamental discoveries that significantly altered concepts about life on the deep seabed. After the discovery and exploration of hydrothermal communities by a team operating a tow sled and the DSV Alvin in 1979, subsequent diving programs found vents in several other locations. Even more widespread are the various cold seep communities, with fauna related to the vent animals but driven by chemical compounds such as methane and hydrogen sulfide. These discoveries, all made and sustained by undersea vehicles, have fundamentally changed scientific understanding of the basic relationships governing life on Earth.
Biotechnology and Biomedical Marine Research
The ocean's animal and plant species form an enormous genetic resource for producing a variety of chemical compounds that can be used for medical, agricultural, and industrial purposes. It is likely that many underseas genetic substances will be discovered and assessed; some have already been developed and have shown potential. The antimicrobial steroid, squalamine, recently isolated from sharks, appears to be a potent deterrent, with unusually slight side-effects, to fungal infections of the type that plague cancer and AIDS patients (Stone, 1993). Many other marine organisms produce similar antibacterial, antiviral, and antifungal agents.
Particularly promising sites for the discovery of new bioactive molecules can be found at the hydrothermal vents that occur at great depths along the ocean ridges. The biological communities there contain enzymes and other compounds that can function at very high temperatures and may provide thermally stable compounds for use in high-temperature catalysts, cleaning agents, or solvents. Deep sea organisms are also sources of pressure-tolerant compounds. One value of pressure-tolerant catalysts, for example, is that their structural hardiness allows them to function effectively in challenging industrial applications (Flam, 1994; Jannasch, 1995; New England Biolabs Catalog, 1994; Adams et al., 1995a).
Undersea vehicles have already performed much of the work on hydrothermal vents, and both DSVs and ROVs are at work in the Pacific and Atlantic oceans, locating and collecting specimens for research. Undersea vehicles must be able to perform deep water operations to locate and survey sites of interest and then inspect them in detail over relatively small areas.
LIVING RESOURCES AND ENVIRONMENTAL MANAGEMENT
Living Resources
Management of marine living resources has grown more challenging as human populations have grown and fishing technology has advanced. Society needs more accurate ways to predict the sustainable yields of commercial fish stocks, including both traditional and nontraditional species. Problems in several of the world's fisheries demand better fishery management information. Such information must rely on data about population variables such as rates of birth, growth, and death; predator-prey relationships; spawning-ground requirements; nursery ground characteristics; the impacts of intensive fishing, and environmental controls. Traditional methods of collecting these data have reached their limits. Undersea vehicles can directly collect some of this information to characterize the state of communities in fishing areas. More important, they can provide new kinds of data (such as behavior patterns, predator-prey intersections, activity levels, and escape responses) critical to understanding these processes (Krieger, 1993; Adams et al., 1995b; Krieger and Sigler, 1996).
|
BOX 3-2 Focal Project 2: Blue Water Oceanographic Sections and Hydrographic Surveys Opportunity. In oceanographic and hydrographic survey work, the operation of one or two AUVs in synchrony with a surface ship would provide a way around the severe limitations imposed by a single ship making measurements along a track. Coordinated data acquisition by two or three platforms would extend horizontally the vertical profiles made by lone vessels, with little additional personnel or operating cost. The data acquisition rate of the ship would be effectively doubled or tripled (or, alternatively, the vessel's hourly costs reduced by one-half to two-thirds), while the quality and simultaneity of the data would be increased. Among the projects that would benefit from such operations are (a) the taking of physical oceanography "sections" composed of sequences of "stations" along a path, usually hundreds to thousands of kilometers long; and (b) the conduct of hydrographic depth surveys or depth profiles made along similar sections for the purpose of charting the seafloor. Objective. Large-scale currents are driven by surface wind stress and density gradients. The currents profoundly condition weather and climate. Reliable three-dimensional models of mesoscale phenomena, such as eddies and convection plumes in the Gulf Stream or cold water plunging in the Labrador Sea, require high-density parametric measurements not available from moored instruments or satellites. Today, establishing the current velocity and transport of water mass, momentum, heat, and salt of a current system requires transiting a research vessel (indicated by "RV" in the accompanying figure below) approximately perpendicular to the estimated direction of the surface flow. Moving at 6 to 12 knots, the vessel acquires data from sensors such as acoustic Doppler current profilers (ADCPs) and other towed instruments such as temperature and salinity sensors. At intervals of perhaps 20 to 50 km the ship stops and takes a "cast," lowering instruments via cable to measure conductivity, temperature, and depth with a CTD profiler and water mass properties, including chlorophyll and dissolved oxygen concentrations, sound speed, light transmission, and water samples. Without an AUV, the RV might have to run a reverse course, perhaps 10 to 50 km removed from the first, to sample spatial variability. During the time it takes to run the return path, however, the ocean has changed, so this method mixes spatial differences with temporal differences (a classic problem in observing fluids). It is the gradients in fluid properties that are important in the hydrodynamics and thermodynamics of the ocean and atmosphere, and it is important to establish the gradients through measurements that are spatially separated but simultaneous, as well as making point measurements that extend over time at fixed locations. The latter are usually accomplished via instrumented moorings. Thus, the use of two (or three) platforms with similar instruments traversing parallel paths allows the simultaneous measurement of spatial gradients in addition to doubling or tripling the area covered. In acoustic depth-sounding, time changes do not arise, so the benefits of simultaneous operations are mainly in efficiency and time savings. However, precision depth-sounding requires observations of upper water column temperature measurements to correct for the speed of sound in seawater; so vertical casts are required here as well. Vehicle System. The figure below illustrates the operational concepts in oceanographic section-taking. The surface research vessel transits while using ADCPs and towed instruments. During transits, the AUVs execute sawtooth or squarewave dive profiles down to perhaps 1,000-meter depth, depending on the quantities to be measured, while running at the same speed as the RV and parallel to it, perhaps 20 km away. At each surfacing, the AUVs acquire GPS fixes to calibrate the inertial navigation systems, used while underwater. Radio frequency communications with the ship may also be needed. The AUVs also use ADCPs while under way and make continuous measurements of temperature, conductivity, depth, sound speed, dissolved oxygen, chlorophyll concentrations, et al. The RV and the AUVs then stop on their stations, the surface vessel to take a section and the AUVs to take a navigation fix, and transmit selected sample data via radio link to the ship or a satellite. After a distance of nearly 1,900 km (1,000 nautical miles), the AUVs are recovered, additional data is downloaded from their solid-state memories, new batteries are installed, and they are relaunched. This process should take only a few hours. The measurement procedures are repeated on each transit/on-station cycle, allowing a three-dimensional view of the ocean volume on three vertical planes (containing the RV data and the AUV profiles). As in Focal Project 1, a human may assume task-level control of the AUV whenever it is advantageous to do so. In the case of acoustic depth-sounding, the AUVs would probably be closer to the survey vessel (perhaps 5 km away) and would remain near the surface but out of the wave zone for stability. The navigation requirements are somewhat more stringent, requiring more frequent GPS fixes, perhaps via a trailing wire. This arrangement would triple the swath width of a ship's coverage. The savings would be considerable; survey vessels cost $15,000 to $20,000 per day to operate. |
|
Performance Requirements:
Analysis of the State of Technology and Practice. The limiting technology is in seawater batteries, but Norwegian aluminum-seawater batteries have demonstrated the required capability. Development and adaptive efforts (but not new technology) are needed for low power drain inertial navigation systems; radio frequency antennas that can function when wet with seawater; sensors with low power drain and small volume; and integrated sensors, navigation, and control systems. Oceanographic Survey AUV in Coordination with Research Vessel 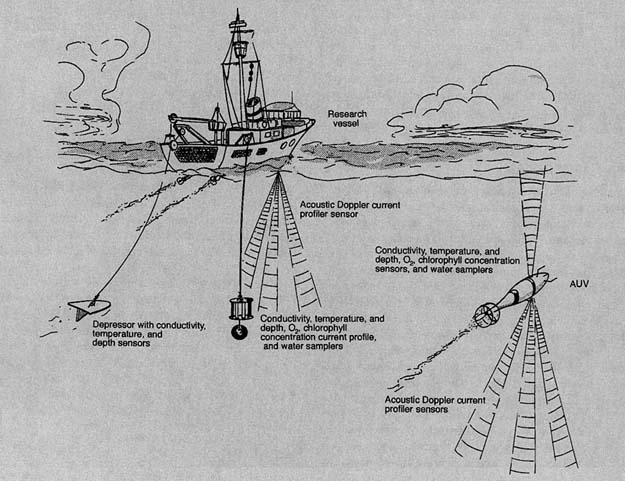 |
Undersea vehicles may be the only practical method of conducting detailed research on deep water fisheries. Such missions would require large area surveys in the water column, on the order of hundreds or thousands of kilometers. To provide reliable and repeatable results, these missions would require accurate navigation. Most importantly, fishery stock assessment vehicles would have to use specialized sensors to perform the actual stock assessments (i.e., determining the size and type of the stocks under study). For research purposes, these surveys would be relatively infrequent (months to years) but fairly intensive during particular projects.
NOAA's National Marine Fisheries Service surveys 325 stations annually to assess fish stocks in U.S. waters from the Canadian border to Cape Hatteras. Each station consists of a 30-minute bottom trawl at about 3.5 knots. These survey tows represent an annual sampling of less than 0.01 percent of the area (U.S. Northeast Atlantic waters) for which stocks are being assessed. Even when the resulting data are supplemented with information on fishing effort and landings, this level of sampling leaves considerable uncertainty about actual fish stocks (NOAA, 1993). It is possible that AUVs with appropriate high-frequency acoustical sensors, integrated with laser-based optical/video systems, could provide better sampling coverage and better resolution in a cost-effective way. Such vehicles would also enable real-time studies of the effects of trawls on the seafloor and on benthic feeding processes. Operating costs for fisheries survey vessels are $5,000 to $15,000 per day, and the annual effort for the northeast region of the United States is about 320 days at sea per year. For the United States, overall annual effort for these surveys involves 1,860 days at sea at a cost of approximately $9.3 to $18.6 million per year.
Marine Conservation
Undersea vehicles are being increasingly used in programs to monitor the ecological status of marine sanctuaries and other subsea habitats. For example, NOAA's Marine Sanctuary Program is responsible for stewardship of a large and growing portion of this country's coastal waters. The Monterey Bay and the Florida Keys are two of the largest and best known marine sanctuaries. Monitoring these and other sanctuaries constitutes a large and growing task for NOAA. In some cases, undersea vehicles already perform habitat assessment and characterization (Robison, 1993; 1995). In the Florida Keys National Marine Sanctuary, researchers from NOAA's National Undersea Research Program have used submersibles to date sea-level changes by sampling reefs at depths to 140 meters and for verifying data sensed remotely from ships. NOAA also used a submersible to observe, describe, map, and quantify benthic community structure and its relationship to geological phenomena. In addition, ROVs have been used in depths from 40 meters to 100 meters to conduct surveys of deep reefs and to assess and characterize habitats. Future requirements will include long-term monitoring and regulation as well as rapid responses to serious perturbations. Undersea vehicles can perform these activities, and NOAA's National Marine Sanctuary Program is integrating these new tools into its regulatory work.
Waste in the Ocean
Wastes in the ocean come from many sources, including runoff from land, legal and illegal ocean dumping, and accidents. Debate continues about the ocean's appropriate role for disposal of other substances, such as sewage sludge, radioactive waste, and municipal wastes (Calmet and Brewers, 1991). The extent and disposition of the wastes in the ocean is rather poorly known. Responsible management of wastes depends on better knowledge of their natures and impacts. Existing sites may require long-term monitoring and, in some cases, perhaps, remediation. Prospective sites need thorough assessment, and undersea vehicles can play an important role in these activities.
The London Dumping Convention3 sets terms for ocean dumping, but the list of legal substances has been steadily reduced in recent decades; most legal dumping in the United States is of dredged material and drilling muds. Illegal dumping has introduced substantial amounts of wastes, including at least 16 nuclear submarine and ice breaker reactors (6 containing radioactive fuel) dumped by the former Soviet Union in arctic marine waters (OTA, 1995). Most coastal nations have discharged industrial and human wastes. Accidents have introduced hazardous cargoes, nuclear reactors, and nuclear weapons into the oceans with poorly known results. Even well-known sites, established legally and deliberately, have generally not been well monitored.
Monitoring requirements vary from site to site. However, they generally include various combinations of studies in hydrography and circulation, radiochemical speciation, source and sink terms, ice dynamics, river and watershed effects, sediment dynamics, impacts on benthic fauna, and food chain transfer (McDowell, 1994). When sampling and collecting at these sites, vehicles must be able to shut down propulsion to avoid disturbing sediments and must have the payload capacity to carry samples to the surface. In general, DSVs are better suited to these tasks than ROVs and AUVs. Better understanding of the deterioration of containers, such as drums and reactors, is also important because any new programs for legal dumping would generate substantial requirements for monitoring and assessment. The proposed disposal of high-level radioactive wastes in the deep sea-floor, if approved, would likely require the use of undersea vehicles, given the great depths at which it would occur
(>4,500 meters) (Calmet and Brewers, 1991). Vehicles would survey and sample sites prior to emplacement, verify emplacement, and perform long-term monitoring.
Site 106, the deep water sewage sludge dump site off the New Jersey coast, is an example of thorough monitoring and a good illustration of the utility of undersea vehicles in the monitoring process (Van Dover et al., 1992; Hill et al., 1993; Bothner et al., 1994). Barges have dumped inventoried sludge at specified positions and prescribed rates. Multidisciplinary teams studied dispersion, transport, and re-mobilization of contaminants and their effects on biomass, diversity, and organism body burdens of toxic metals and organics. Underwater vehicles, both DSVs and ROVs, played central roles in these studies, recovering samples, taking measurements, performing surveys, and recording observations (Bothner et al., 1994). An AUV may participate in this program in the near future as well. These studies have had important findings, but Site 106 is unusually well characterized.
The Naval Research Laboratory, working with industry and academic researchers, has begun a $1.5 million program to assess the environmental, technical, and economic aspects of isolating industrial wastes, such as sewage sludge and dredge spoil, on the ocean's abyssal plains, more than 3,000 meters deep. These areas are believed to be geologically stable and to experience only slight water currents. The Naval Research Laboratory will assess several specific sites and prepare a site survey plan, monitoring program, and economic analysis (Valent and Young, 1995).
Some waste sites will require action to remediate environmental damage and prevent further damage, either by recovery for reprocessing, disposal on land, or entombment in place. Remediation programs, especially those involving radioactive wastes, could become quite large and require extensive monitoring to which ROVs could contribute. Possible candidate sites include shallow, high-level radioactive waste sites in the Russian Arctic; shallow, low-level sites off the coast of California (Booth et al., 1989); and the Russian Arctic rivers. Other candidates include sunken nuclear submarines and nuclear weapons lost in deep waters. The Russian DSVs MIR I and MIR II have been used to inspect the site of the sunken Russian nuclear submarine Komsomolets and to cover the open torpedo tubes to prevent current flow from spreading radiation that may escape from the submarine's nuclear weapons (Seymour et al., 1994; OTA, 1995).
Existing undersea vehicles and techniques could be used to survey prospective sites for emplacement of waste such as sewage sludge. ROVs, not unlike those at work in the offshore oil and gas industry, could support much of the emplacement process, although such tasks could require greater depth capability than these systems currently provide. AUVs might perform this work more efficiently, but most of the survey requirements are within the capabilities of existing DSV and ROV technology or the near-term extensions of current capabilities. In any case, improved in situ sensing would be helpful if not necessary. Some surveys, however, could require capabilities that existing technology and existing service companies cannot presently supply.
Monitoring Water Quality
Dinoflagellate and algae blooms, often associated with water pollution in the coastal zone, can have major impacts on fisheries and coastal recreation. Toxic dinoflagellate or diatom blooms (often called "red tides") can result in shell-fish poisoning, with far-reaching effects throughout the food chain. The "brown tide," which seems to be caused by the introduction of new detergent additives (Dzurica et al., 1989; Sieburth, 1989), caused the collapse of the scallop fishery in the middle-Atlantic and New England states, with economic losses of as much as $2 million per year.
To date, studies of coastal pollution and monitoring have not made wide use of undersea vehicles, although such use is growing. Scientists have used ROVs to make visual assessments of the effect of oxygen depletion on benthic and water column populations, to measure oxygen, and to collect plankton samples (Rabalais et al., 1991, 1992). In the future, undersea vehicles could make graphic or video surveys of the bottom near outfalls to assess population changes and diseased organisms. They could also monitor waste plumes or the abundance of toxic bloom organisms. An AUV system is also being developed that could monitor a local habitat on a regular basis from a moored garage (von Alt and Grassle, 1992; von Alt et al., 1994).
Much of the potential for using undersea vehicles in water quality research and monitoring will depend on the development of sensors capable of high-quality measurements of environmentally important chemical species. Sensors designed for oceanographic work may prove useful in detection of dissolved trace metals and nutrients, but many important chemical species, such as chromium, cannot yet be detected using sensors suitable for undersea vehicles. Recent advances in biochemical sensors, including the development of DNA probes for organisms that produce the highly toxic domoic acid, have direct application for water quality monitoring (Scholin et al., 1994). Biochemical sensors that can be deployed aboard undersea vehicles are rapidly being developed.
MARINE INDUSTRIAL ACTIVITIES
The sea provides a variety of nonliving resources, such as energy sources, metallic ores, and other minerals, and provides a venue for economic activities, such as developing and maintaining telecommunication linkage and undertaking salvage operations. In all of these areas, undersea vehicles offer unique tools for conducting inventories and extracting resources and for various inspection and manipulation tasks.
Oil and Gas
Offshore oil and gas production provides a major part of the U.S. energy supply—nearly one-fourth of the nation's natural gas and one-sixth of the domestic oil supply. While the market price for gas has rebounded recently to mid-1980 levels, world crude oil prices remain depressed; thus increasing pressures to reduce production costs. The restrictions on U.S. east and west coast offshore exploration and development imposed by Congress on environmental grounds leave the Gulf of Mexico as the focus for developing new fields and enhancing production from older ones. For the most part, the new fields of the Gulf are in water depths beyond the reach of divers, and their development requires using alternative technologies such as floating production facilities and undersea vehicles (Cafarelli, 1994). The rapidly changing environment for offshore oil and gas operations in the Gulf of Mexico—the increasing depth of new fields and greater distances between surface facilities—demands new tools and techniques for inspection and other tasks. Undersea vehicles have assumed a support role in many of these new approaches.
The offshore oil and gas industry is the leading user of undersea vehicles, worldwide, both in numbers and in dollar value. The industry used DSVs briefly during the early rapid growth of offshore exploration in the 1960s and 1970s, but ROVs—with their lower risk to humans, reduced system costs, and greater endurance—eventually displaced DSVs for most tasks. The proliferation of ROVs continued as exploration and production operations moved into waters deeper than 300 meters—beyond human diver capabilities—in the mid-1970s. That evolution shaped the present state of ROV development throughout the world to the extent that ROVs routinely perform many functions in offshore oil operations. While research and development for various sensors, tools, and subsystems originally came from other industries, the oil industry and its suppliers brought the technologies together and built practical working hardware. More than 90 percent of the nearly 300 nonmilitary, work-class ROV systems in use worldwide today are supporting offshore hydrocarbon exploration and production. The committee estimates that 80 percent of these systems are operating in foreign waters. The focal project on subsea oil field service inspection and intervention (see Box 3-3) illustrates how presently available technologies can be focused to respond to the new requirements of the offshore industry in U.S. waters. The selection of an AUV over an ROV for such an application will depend on the relative costs and benefits of the two vehicle types. Cost evaluations should take into account support systems and flexibility in performing multiple tasks. An AUV's independence from surface support may have advantages in regions where weather and sea conditions can interfere with routine operations.
Marine Minerals
Mineral deposits on and beneath the EEZ seafloor of the United States are potentially an important national asset. A variety of metal ores are widely distributed there, including phosphorites at depths up to 4,500 meters, metalliferous sulfides (polymetallic sulfides) at depths greater than 700 meters, and metalliferous oxides (manganese nodules and crusts) at depths greater than 1,500 meters. For economic reasons, however, marine mining today is mainly a matter of recovering easily accessible minerals, such as sand and gravel or placer deposits in nearshore waters less than 100 meters deep, using readily available and cost-effective dredging techniques.
The recovery of deep water minerals will require new techniques, but there is little incentive for government or industry to invest in developing the technology. Depressed mineral prices and questions about the impacts of uncertain political and environmental policies (e.g., leasing, environmental effect, and restoration) will continue to slow development and exploitation for at least the next decade. Deep water mining is likely to begin sometime in the next 10 to 30 years, depending on market conditions (NRC, 1989).
In the near-term, the industry needs scientific information about the extent and value of potential mineral resources in the EEZ. At present exploration is mainly a matter of mapping seafloor depths using shipboard and towed sensors. While this topographical mapping is useful, it provides little information on the extent or thickness of ore-bearing zones or on the concentrations of minerals within the area. Assessing seabed minerals quantitatively, with realistic economic valuations, will require new exploration techniques and sensors that can characterize and assay the constituents of ore deposits both in wide area surveys (over hundreds of square kilometers) and in precisely localized measurements and samples. The committee's focal project on search and survey (see Box 3-4) illustrates a near-term application for a vehicle that could characterize seabed areas for minerals distribution.
To enable the recovery of deep water minerals, mobile seabed miners will likely be more practical in the longer term than the dredges used today in shallow water. Such mobile miners are essentially large ROVs, powered and controlled from surface vessels. They will perform tasks such as breaking up consolidated seabeds, scooping or dredging surface materials to precise depths below the seafloor, crushing and mixing the materials into slurries, and pumping or lifting the product to the surface. Mobile miners will require significant amounts of surface-supplied power (hundreds to thousands of kilowatts), seabed mobility and stability for a wide variety of slopes and bottom conditions, and accurate navigation to measure the quality and quantity of ore and minimize recovery of noncommercial product. When this type of activity does become practical, environmental monitoring of the area around the mining sites may be required as well, probably involving other types of undersea vehicles. To date, many mobile miner concepts have been proposed, and prototype systems have been tested, but no full-scale commercial equipment has emerged.
Ocean Energy
Electrical and chemical energy from the ocean could be practical alternatives to fossil fuels in some cases. Geothermal, ocean thermal, kinetic (wave or current), and biomass energy from the ocean can all be converted to useful forms. Several tidal and wave power plants have been built or are planned. Ocean thermal energy conversion (OTEC) has been demonstrated several times over the past century. OTEC may be the most practical ocean energy technology for large-scale production and may have the most relevance to undersea vehicles. OTEC converts the temperature differential between solar-warmed surface water and cold deep water (600 to 900 meters) into electrical energy using a circulating working fluid that is vaporized by warm surface water and then expands to operate a gas turbine before being recondensed by cold deep water. Low fossil fuel prices have combined with the high capital costs of OTEC plants to slow development since the 1970s. OTEC plant ships4 of modest size (5 to 20 megawatts) are now under serious consideration for generating electricity in tropical and semitropical locations on islands and around the Pacific Rim, where both the geography and economics are favorable.
The Natural Energy Laboratory of Hawaii is building an experimental OTEC plant at Keahole Point, Hawaii. This shore-based facility is scheduled to be completed in 1996. Installation of a commercial plant in the next decade may lead the way to expanded use of the immense thermal energy stored in the world's oceans. Particularly appealing are the prospects for using the electrical output of an OTEC plant for production of combustible transportation fuels (Avery and Wu, 1994). The electricity is used on-board the plant ship to hydrolyze seawater, which is then reacted with atmospheric nitrogen to produce ammonia or with carbon sources (such as coal) to produce methanol. Both ammonia and methanol can be burned in modified internal combustion engines. Secondary output includes gaseous hydrogen, oxygen, desalinated water, and other byproducts.
Undersea vehicles will play a role in the survey, construction, and operation of OTEC facilities. These functions will include exploration and survey of the seabed, where moorings and cold water pipe routes are planned and where data need to be acquired for environmental assessment and hardware design. Undersea vehicles may also perform inspection and maintenance of the subsea elements of commercial plants once they are installed. For example, ROVs would be used in much the same way as offshore oil platforms, performing inspection and maintenance tasks. An OTEC plant ship has a very large cold water pipe reaching to approximately 900-meter depth. Inspecting and servicing this pipe is an important potential application for undersea vehicles; cleaning algae and barnacles from subsurface heat exchangers is another.
Mission requirements for undersea vehicles in the ocean energy industry would be similar to those in the offshore oil and gas industry, with the addition of specific sensors and intervention requirements. These requirements will involve a great deal of detailed observation and intervention, with manipulation capabilities of sufficient strength for in situ construction and maintenance tasks.
Salvage and Recovery
Salvors' traditional use of divers had restricted work to depths of less than 100 meters until the past 30 years. Advances in diving technology begun in the 1960s, such as saturation diving and modern diving suits, have since extended salvage capabilities to greater depths, depending on the specific task. While undersea vehicles can be used to salvage materials for their commercial value, recovery can also make important contributions that affect public safety and national security. Recovery of a jet engine, for example, rarely yields hardware financially valuable except as scrap; however, such an engine may hold clues to the causes of a plane crash. For example, the U.S. Navy has used DSVs and ROVs to recover F-14 engines, which were then examined to determine the cause of engine failure to prevent further accidents. Undersea vehicles are used routinely to recover entire aircraft, flight recorders, hazardous materials, and other materials requiring study and analysis.
The Navy first developed and used ROVs for recovering torpedoes at test sites. In 1966, after an extensive search by various types of undersea vehicles and finally after it was located by the DSV Alvin , a U.S. Navy ROV, a cable controlled underwater recovery vehicle (CURV), recovered a lost hydrogen bomb from a depth of nearly 1,000 meters. In 1986, the Navy's nuclear powered research submarine, NR-1 , located and classified debris from the space shuttle Challenger. 5 Critical components of the solid rocket booster were then verified by the DSV Johnson Sea-Link I and recovered by the ROV Gemini (NAVSEA, 1988). In 1990, the DSV Sea Cliff recovered the cargo door of a United Airlines 747 from a depth of 4,317 meters in the Pacific, following search and location by the Orion search system. This recovery and others, such as recovery of components of an Air India 747 lost in the North Atlantic off Ireland and of a South African Airlines 747 that crashed into the Indian Ocean off Mauritius, have caused the public to expect the federal government to use national assets, as necessary, to provide clues to aircraft and maritime accidents and unexplained losses.
Treasure hunters are using undersea vehicles more
|
BOX 3-3 Focal Project 3: Subsea Oil Field Inspection and Intervention Opportunity. In an effort to reduce the cost of hydrocarbon production in the deeper waters of the outer continental shelf, the U.S. oil industry is turning from fixed or floating platforms to "subsea completion systems." With this technology, a "satellite" unit operates on the seafloor with a platform of its own. These satellite installations include seafloor templates and wellheads and are within oversight proximity to a central production platform, which can be up to 46 km (25 nautical miles) away. Each production platform can handle a number of satellites. Satellite units direct the oil or gas through a pipeline along the seabed to the central platform. Objective. Satellite installations and their pipeline connections require periodic inspection and intervention for continued, reliable operation. Presently this involves leasing a support vessel outfitted with an ROV system, with the possible addition of a towed sensor to inspect flowlines and control cables. An AUV could perform satellite and pipeline inspection and intervention tasks by operating from the central platform and making excursions to the wellhead sites. The AUV would eliminate the need for leasing an expensive surface vessel (at approximately $20,000 per day), and it would be able to survey pipelines and control cables linking the central platform with the satellite subsea wellheads while in transit to or from the satellite. Response to unplanned and emergency situations would be more rapid than using surface vessels traveling from a shore service site. Vehicle System. The accompanying figure illustrates the operations concept of an oil field service AUV, which would be "garaged" at the central platform and would be capable of operating autonomously or under supervisory control of an operator on the platform. At the satellite, the vehicle would connect to a fiber-optic link permanently installed in the satellite for operation and feedback in the supervisory mode. The vehicle could perform detailed observation and intervention of the satellite with an operator in the control loop in real-time, if the system had task-level control.1 The vehicle would then transit back to the platform autonomously; it could also return on its own at any time during the mission in case of a loss of communications. If multiple sorties were required, the vehicle could be recovered and replenished by recharging the batteries. Performance Requirements:
|
frequently in their salvage efforts. In the early 1990s, the Columbus America Discovery Group used an ROV to recover gold worth millions of dollars from the ship SS Central America at a depth of more than 2,000 meters. The Monterey Bay Aquarium Research Institute used an ROV to photograph and survey the sunken Navy dirigible Macon. Similar operations were performed on the Titanic, Bismarck, and Lusitania. Such efforts are neither pure archaeology nor pure salvage, but combinations thereof.
Requirements for salvage include both large area surveys and detailed observation and manipulation. DSVs and ROVs have repeatedly performed these tasks successfully. AUVs, such as AUSS, the U.S. Navy Advanced Unmanned Search System vehicle, have also performed automated search and survey operations. This capability, widely applied, could significantly improve the efficiency and success rate of salvage and recovery operations, especially if employed in conjunction with DSVs or ROVs.
For many years, marine archaeologists have used divers to work in relatively shallow waters. During the past four decades, pioneers, including Edwin Link, Willard Bascom, and George Bass, used undersea vehicles for archaeology at much greater water depths, adapting technology developed mainly for oceanographic research, offshore oil operations, and military activities. In 1966, the DSV Aluminaut discovered two cannon-carrying wooden ships on the seafloor off Palomares, Spain; in 1974, a Johnson Sea-Link DSV surveyed the wreck of the
|
Analysis of the State of Technology and Practice. The basic technology supporting the AUV vehicle design and operation is in place. However, development will be required in the following areas:
To accomplish intervention tasks at the subsea satellite, improved electronically operated manipulators will be required, and special features will have to be built into the satellites to permit the most efficient use of service AUVs. Subsea Oil Field Inspection and Intervention Vehicle Concept 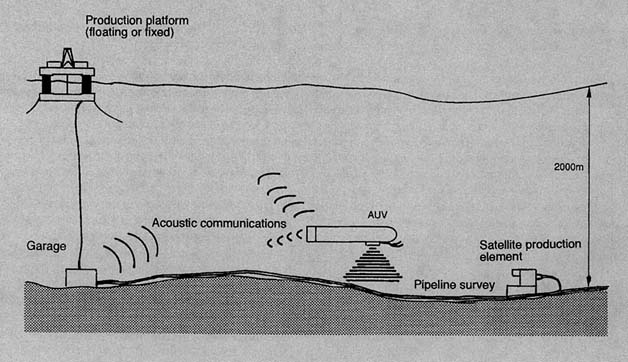 |
USS Monitor, producing a photo mosaic; and 1990, archaeologists used an ROV to examine and photograph Hamilton and Scourge, American warships sunk during the War of 1812, on the bottom of Lake Ontario.
An archaeological survey and excavation must meet exacting standards, using procedures that maximize the amount of information available from a site. Much of this work has primarily been observational because there is neither the technology nor the procedures to perform proper archaeological excavations below diver depths. Extensions of undersea salvage capabilities combined with archaeological survey standards could move archaeology surveys into deeper depths. Many of the required capabilities may also be adapted from those developed for other applications, such as oceanographic surveys and sampling, and from scientific, military, and commercial search and survey methods.
The focal project on search and survey (see Box 3-4) describes the potential for using a conceptual, improved AUV optimized for performing the search and survey tasks that must precede recovery or salvage operations.
Communications
One of the world's fastest growing industries is submarine telecommunications. Lightweight fiber-optic cable, with its great bandwidth, clarity of transmission, and nonrepeater systems that can span long distances (>300 kilometers) is
|
BOX 3-4 Focal Project 4: Search and Survey Opportunity. Full-ocean search and surveys to 6,000 meters for sunken objects or valuable materials on the seafloor are currently undertaken with towed systems that require winches and cables. The cost of towed search equipment, support ships, boats, and personnel is significant—exceeding $40,000 per day for operations over 5,000 meters depth. Moreover, search techniques using towed bodies require over half of the operational time to perform turns in the search pattern. In situ observation during search operations and the ability to provide quick, detailed search and identification response to probable targets are needed to reduce cost and search time. A method of providing limited object retrieval capability will further reduce overall operational costs and reduces the probability of loss of target during the search mode. In addition, portability and flexibility of the search and survey system will be enhanced if the system is not dependent on a dedicated surface support ship and if it can be used on a ship of opportunity. Objective. To survey and locate seabed minerals such as nodules, sunken vessels, high-value debris, archeological objects, and aircraft wreckage, and to recover small high-value objects. Vehicle System. An AUV, like the one shown below, can be launched from a platform crane or stern ramp of a ship of opportunity. After launch, the AUV dives to the seafloor and executes a preprogrammed, long-range side-scan search or survey while traveling approximately 30 meters above the seafloor. The vehicle may carry opportunistic sensors (nonintrusive mineral detectors and subbottom profilers to detect ore bodies or buried materials of value). The vehicle then performs a closer inspection and identifies any targets, using higher-resolution sonar and optical video imagers. The vehicle recovers an identified object with its own manipulator or attaches a lift line to the object for recovery by a surface vessel. Both tasks require heavy and precise manipulation capabilities. The AUV then returns to the surface on command at the end of the survey or recovery. The mission involves searching and discovery. Human designation of tasks in response to opportunities is called for. Humans monitoring the preprogrammed search in near real-time can assume low-bandwidth, task-level control when desired, owing to recent advances in acoustic communications and high-level control architectures (as in focal projects 1 and 2). Performance Requirements:
|
|
Analysis of the State of Technology and Practice. DSVs and ROVs have routinely performed search and recovery tasks successfully. Over the past decade, several types and sizes of AUVs, including the Navy's Advanced Unmanned Search System (AUSS) vehicle, have been fielded carrying a variety of sensor suites. These have mostly operated in depths less than 1,000 meters. Continuing developments in control, data processing, data storage, acoustics, and optics have enhanced the feasibility of using large AUVs for these missions, but substantial advances will be needed in the following areas:
Search and Survey Concept 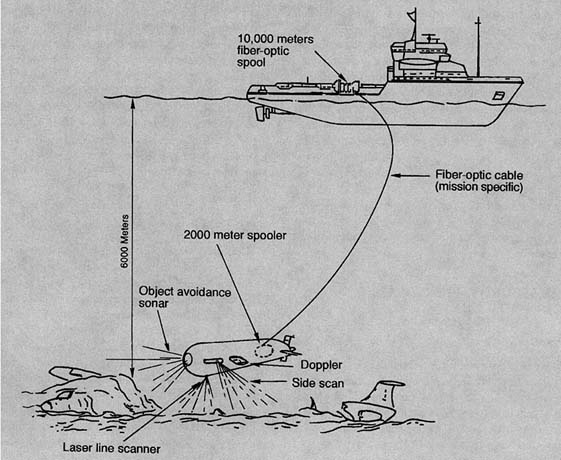 |
becoming the mainstay of global communications. Systems currently being installed provide 320,000-channel capacity, 40 times greater than could be achieved 15 years earlier. Construction of undersea cables is a nearly $1 billion enterprise, growing 7 to 8 percent per year. Between $8 billion and $10 billion of undersea fiber-optic systems will be built by late 1997, according to American Telephone and Telegraph. These systems will crisscross the globe, with long runs across the Atlantic and Pacific and many shorter runs linking islands and coastal cities (Keller, 1992; Bannon, 1993).
An important part of this expansion, especially in terms of construction and maintenance, is the interconnection of coastal cities. Problems in obtaining land rights-of-way have led some telecommunications systems to connect cities by sea where possible, using short-haul, repeaterless systems along the coastlines. These systems require cable to be buried to depths greater than about 350 meters in areas of commercial shipping or fishing. Assurance of the integrity of these rapidly expanding undersea interconnections requires the ability to repair cables in the deeper water, where faults have occurred due to human activity, sediment slumps, or earthquakes. The current method of maintaining connectivity in these cables, when interrupted by fishing or seismic activity, is the recovery, assisted repair, and reburial of the cables by ROVs. An example is American Telephone and Telegraph's advanced submersible craft for assisting cable repair and burial, which are designed for undersea inspection, maintenance, and repair operations and can operate in rough seas at depths up to 2,500 meters (Joggerst, 1995). These vehicles will continue to occupy a specialized niche in advanced technology within the field of undersea vehicles, largely developed and operated in-house by communications companies (Smith, 1992).
NATIONAL SECURITY, PUBLIC SAFETY, AND REGULATION
Military Applications
The military was the main force behind the development of undersea vehicle technology in the United States. Techniques and devices developed for military applications have led the field in technology and have been transferred to other fields, such as offshore oil and gas operations. They have also been used for scientific research for military applications. Oceanography and ocean engineering research have been central to the U.S. Navy's support of DSVs. Navy-sponsored DSVs have tested materials and sensors and explored the ocean for military and scientific users. They have also been used for submarine rescue; deep ocean search (to 6,000 meters); and location, inspection, and retrieval of items on the seabed. Navy assets include three, three-person DSVs: Sea Cliff (6,000 meters), Turtle (3,000 meters), and Alvin (4,500 meters, operated by the Woods Hole Oceanographic Institution); two research submarines, NR-1 (nuclear powered) and USS Dolphin (battery/diesel powered); and two deep submergence rescue vehicles, Mystic and Avalon , whose hatch skirts are capable of mating to U.S. and foreign submarines.
The Navy began development of ROVs in the 1960s to perform many of the tasks of DSVs at lower cost and with greater safety. However, DSVs continued to be the dominant types of vehicles used in research, search, and high-value object retrieval well into the 1970s. Heavy duty work ROVs, such as CURV III and the advanced tethered vehicle (6,000 meters), can perform deep ocean work such as the retrieval of missiles and torpedoes and the salvage of military aircraft. Other military ROVs can inspect, implant, and recover objects, salvage, and locate and neutralize mines.
During the past decade the military has developed or sponsored the development of both AUVs and semiautonomous vehicles. AUVs could multiply the effectiveness of today's smaller military forces. Potential applications include search, detection, and identification; weapon targeting and placement; countermeasures employment (mines, torpedoes, sonar); mapping and survey; communications; surveillance; and object implantation and recovery. Military-supported AUVs include the AUSS , which can perform search and survey to depths of 6,000 meters. The Unmanned Free-Swimming System was built to demonstrate the viability of low drag, long-distance AUVs. In addition, as noted in Chapter 1, two large ARPA-sponsored AUVs built by Draper Laboratories have served as testbeds for mine countermeasures and other military missions.
Enforcement of Laws and Regulations
Undersea vehicles aid in enforcing a wide variety of laws and regulations—from helping detect illegal pollution to interdicting illegal drug shipments. The U.S. Coast Guard (USCG) is the federal agency that most frequently uses undersea vehicles for nonmilitary missions. Three major USCG programs presently use or could benefit from undersea vehicles: search and survey, marine environmental protection, and oil and toxic chemical spill response (USCG, 1994). Undersea vehicles could also perform surveillance for law enforcement. The USCG is responsible for enforcing international agreements and federal laws over, on, and under the high seas and waters subject to U.S. jurisdiction. These responsibilities include drug interdiction, fisheries enforcement, and illegal immigration interdiction.
Other uses for undersea vehicles are monitoring for pollutants, sampling beneath ships entering and leaving ports to ensure compliance with applicable laws, and conducting surveillance and under-hull inspections of vessels suspected of carrying contraband. The USCG's marine environmental protection program includes two major missions: marine environmental response and port safety, both of which respond to pollution threats in coastal waters and some inland
waters. In support of the 1972 Federal Water Pollution Control Act, the USCG prepared a national oil and hazardous substance spill response system that requires contingency planning and interagency and international relationships. In many areas ROVs are part of the regional response systems assets. The USCG uses undersea vehicles to respond to oil and toxic chemical spills in coastal waters. For example, ROVs are used to evaluate leaking vessels damaged by groundings or collisions.
Real-time assessment of damage below the waterline can speed responses to accidents and limit damage to the environment. A vehicle assessing below-waterline damage to ships would perform a detailed observation and intervention task. Such a vehicle would need sonars and optical/video sensors to record damage and would have to be compact, highly maneuverable, and readily transportable to accident sites. An ROV might attach to the vessel and crawl along the hull to assess damage and possibly to aid in plugging or patching holes. The ROV would need dexterous manipulators capable of handling a variety of tools performing underwater cutting and welding. These ROVs could also aid in responding to pollution hazards by performing medium-area (tens of kilometers) surveys with chemical sensors to assess the extent of a spill. Vehicles performing law enforcement tasks, such as searching for contraband or providing port security, would operate in shallow water with acoustic sensors, performing local area or dispersed surveys.
FINDINGS
Finding. Humanity's need to explore and work in the ocean is growing day by day. Coastal populations are increasing worldwide, and with them, both coastal pollution and dependence on ocean resources such as fish. Nonliving resources (including oil, gas, and other minerals) require exploration and extraction on and beneath the seafloor in deeper and deeper water. Profound discoveries in the Earth sciences—about the climatic future and the planet's tectonic structure—continue to be made through undersea activities. Defense and law enforcement agencies have their own growing requirements for undersea vehicles. All of these national needs can be met more effectively through developing the capabilities of undersea vehicles.
Finding. Scientific exploration of the seafloor with undersea vehicles has given scientists firsthand evidence of seafloor spreading and other processes of plate tectonics that have immense significance for science and for the future of humanity. Findings made possible by undersea vehicles offer fundamental geological and biological knowledge of great value. Undersea vehicles also provide strategic and economic benefits, helping locate resources and predicting volcanic activity and earthquakes.
Finding. Undersea vehicles will allow more accurate measurements of the flows of chemicals and heat in the ocean. For example, they can be used to acquire data to determine the extent to which the greenhouse gas, carbon dioxide, is removed from the atmosphere and sequestered in the deep oceans.
Finding. The biological productivity of the oceans is only dimly understood today owing to the scarcity of data on ocean food chains. Today's scientists rely largely on towing nets behind surface vehicles to sample many kinds of ocean life. Undersea vehicles can give scientists direct access to the plants and animals, including many that are thought to be too delicate or elusive to be captured by nets. The hitherto unsuspected existence of specialized communities at hydrothermal vents and cold seeps was confirmed by scientists using undersea vehicles. Further exploration is certain to reveal other profound discoveries, including, perhaps, new biological chemicals with medical or industrial uses.
Finding. Better management of fisheries is vital to continue feeding the Earth's growing population. Many of the world's commercial fisheries are overexploited. Undersea vehicles could directly collect information on rates of birth, growth, and death; predator-prey relationships; spawning and nursery ground requirements; and the impact of intensive fishing.
Finding. The ocean contains a large, but poorly quantified and characterized, amount of waste that is both deliberately disposed of and inadvertently allowed to reach the water through accidents and runoff from land. Undersea vehicles with new kinds of chemical sensors could help detect pollutants and trace them to their sources. Conventional ROVs, with video cameras and sampling tools, are already used to monitor disposal sites. Others may be useful in assessing the wisdom of waste disposal in deep sea trenches or on the abyssal plains.
Finding. Finding, developing, and supporting routine production of the ocean's nonliving resources—particularly offshore oil and gas—has involved a number missions for ROVs (such as manipulation of values and controls, cutting, replacement of components, inspection, and monitoring), many of which require capabilities to perform increasingly complex functions. Mounted video cameras and magnetic sensors are used routinely in the offshore oil and gas industry. ROVs are now being used to support production in depths to 1,000 meters and have been used in exploratory drilling at more than 2,000 meters. Deeper water, more complex applications, and more wells will require the continued evolution of ROVs, and perhaps other vehicles, with more fully automated devices, better navigation and location systems, and greater capabilities for operation and maintenance tasks. The metals and other minerals found on the seabed will require new surveying and prospecting techniques and powerful undersea dredges and loaders should extraction become feasible and economical. Another extremely
important and rapidly growing market for ROVs is in laying telecommunication cables.
Finding. A variety of industrial needs can be met by undersea vehicles. Salvage and retrieval of valuable items from the seafloor is one of the most well-established applications of undersea vehicles. This application originated in the U.S. Navy programs of the 1960s, and undersea vehicles proved themselves in missions such as the after-crash recovery of aircraft engines and other components.
Finding. Military applications (including rescue, search and retrieval, and mapping of the bottom) are served by a small fleet of DSVs, ROVs, and AUVs. Since mid-1994, several of the DSVs and an ROV have been made available for scientific research when they are not committed to defense missions or would otherwise be idle. The U.S. Navy and ARPA are the sources of most research and development support for AUVs.
Finding. Law enforcement and regulatory agencies use undersea vehicles in a variety of missions, including helping detect pollution, interdicting illegal drug shipments, and monitoring marine sanctuaries and other protected areas. Improved chemical and optical sensors will make all of these tasks easier and more effective.
REFERENCES
Adams, M.W.W., F.B. Perler, and R.M. Kelly. 1995a. Extremozymes: Expanding the limits of biocatalysis. Biotechnology 13 (7):662–668.
Adams, P.B., J.L. Butler, C.H. Baxter, T.E. Laidig, K.A. Dahlin, and W.W. Wakefield. 1995b. Population estimates of Pacific coast groundfishes from video transects and swept area trawls. Fishery Bulletin 93: 446–455.
Avery, W.H., and C. Wu. 1994. Renewable Energy from the Oceans: A Guide to OTEC. New York: Oxford University Press.
Bailey, T.G., J.J. Torres, M.J. Youngbluth, and G.P. Owen. 1994. Effect of decompression on mesopelagic galetinous zooplankton: A comparison of in situ and shipboard measurements of metabolism. Marine Ecology—Progress Series 113(1–2):13–27.
Bannon, R.T. 1993. Cable protection and preventive maintenance in Micronesia and Polynesia. Pp. 105–108 in the Proceedings of the 11 th Annual Conference, Underwater Intervention '93 held January 18–21, 1993 in New Orleans, Louisiana. Washington, D.C.: Marine Technology Society.
Booth, J.S., W.J. Winters, L. Poppe, J. Neiheisel, and R. Dyer. 1989. Geotechnical, geological, and selected radionuclide retention: Characteristics of the radioactive waste disposal site near the Farallon Islands. Marine Geotechnology 8:11–132.
Bothner, M.H., H. Takada, J.T. Knight, R.T. Hill, B. Butman, J.W. Farrington, R.R. Colwell, and J.F. Grassle. 1994. Sewage contamination in sediments beneath a deep ocean dump site off New York. Marine Environmental Research 38:43–59.
Cafarelli, W.J. 1994. Possible uses of autonomous underwater vehicles in offshore seismic exploration. P. 11 in MIT Marine Industry Collegium Symposium on Commercialization of Underwater Vehicles held January 25–26, 1994 in Cambridge, Massachusetts. Report No. MITSG 93-32. Cambridge, Massachusetts: MIT Sea Grant Program.
Calmet, D.P., and J.M. Brewers. 1991. Radioactive waste and ocean dumping: The role of the IAEA. Marine Policy 15(6):413.
Coale, K.H., C.S. Chin, G.J. Massoth, K.S. Johnson, and E.T. Baker. 1991. In situ chemical mapping of dissolved iron and manganese in hydrothermal plumes. Nature 352:325–328.
Corliss, J.B., J. Dymond, L.I. Gordon, J.M. Edmond, R.P.V. Herzen, R.D. Ballard, K. Green, D. Williams, A. Bainbridge, K. Crane, and T.H. Vanandel. 1979. Submarine thermal springs on the Galapagos Rift. Science 203:1073–1083.
Curtin, T.B., J.G. Bellingham, J. Catipovic, and D. Webb. 1993. Autonomous oceanographic sampling networks. Oceanographics 6(3):86–93.
Davis, C.S., Gallager, S.M., and Solow, A.R. 1992. Microaggregations of oceanic plankton observed by towed video microscopy. Science 257:230–232.
Dzurica, S., C. Lee, E.M. Cosper, and E.J. Carpenter. 1989. Role of environmental variables, specifically organic compounds and micronutrients, in the growth of the Chrysophyte Aureococcus anophagefferens. Pp. 229–253 in Novel Phytoplankton Blooms: Causes and Impacts of Recurrent Brown Tides and Other Unusual Blooms. E.M. Cosper, V.M. Bricelj, and E.J. Carpenter, eds. New York: Springer-Verlag.
Edmond, J.M., and K.L. Von Damm. 1979. Chemistry of hot springs on the East Pacific Rise and their effluent dispersal. Nature 297:187–191.
Flam, F. 1994. The chemistry of life at the margins. Science 265:471–472.
Fox, G.C. 1995. Special collection on the June 1993 volcanic eruption on the coaxial segment, Juan de Fuca Ridge. Geophysical Research Letters 22(2):129–130.
Fox, P.J., and D.G. Gallo. 1984. A tectonic model for ridge-transform-ridge plate boundaries: Implications for the structure of oceanic lithosphere. Tectonophysics 104:205–242.
Guinasso, N.L., I.R. MacDonald, J.M. Brooks, R. Sassen, and K.M. Scott. 1994. Seafloor gas-hydrates: A video documenting oceanographic influences on their formation and dissociation. Transactions in the American Geophysical Union (EOS) 75:175.
Hamner, W.M., and B. H. Robison. 1992. In situ observations of giant appendicularians in Monterey Bay. Deep Sea Research 39(7/8): 1299–1313.
Hawkes, G.S., and P.J. Ballou. 1990. The ocean everest concept: A versatile manned submersible for full-ocean depth. Marine Technology Society Journal 24(2):79–86.
Hill, R.T., I.T. Knight, M.S. Anikis, and R.R. Colwell. 1993. Benthic distribution of sewage sludge indicated by Clostridium perfiangers at a deep ocean dump site. Applied Environmental Microbiology 59:47–51.
Jannasch, H.W. 1995. Deep sea hot vents as a source of biotechnologically relevant microorganisms. Journal of Marine Biotechnology 3:1–8.
Joggerst, P. 1995. AT&T's undersea fiber-optic cable systems. Sea Technology 36(7):29.
Keller, J.J. 1992. AT&T racing rivals to lay undersea lines. The Wall Street Journal, August 14, 1992. B1 and B8.
Krieger, K.J. 1993. Distribution and abundance of rockfish determined from a submersible and by bottom trawling. Fishery Bulletin 91:87–96.
Krieger, K.J., and M.F. Sigler. 1996. Catchability coefficient for rockfish estimated from trawl and submersible surveys. Fishery Bulletin 94: 282–288.
Matsumoto, G.I., and G.R. Harbison. 1993. In situ observations of foraging, feeding, and escape behaviors in three orders of oceanographic Ctenophores: Lobata, Cestida, and Beroida. Marine Biology 117:279–287.
McDowell, S.E. 1994. Seafloor monitoring requirements of a major dredged material disposal project offshore New Jersey. P. 16 in MIT Marine Industry Collegium Symposium on Commercialization of Underwater Vehicles held January 25–26, 1994 in Cambridge, Massachusetts. Cambridge, Massachusetts: MIT Sea Grant Program.
NOAA (National Oceanic and Atmospheric Administration). 1993. 1995–2005 Strategic Plan, Build Sustainable Fisheries. (Available from Deputy Undersecretary, NOAA, Room 5810 Herbert Hoover Building, 14th and Constitution Avenue, N.W., Washington D.C. 20230.)
NAVSEA. 1988. Space Shuttle Challenger Salvage Report. NAVSEA T9597-AA-RPT/00. (Available from Commanding Officer, Navy
Publication and Forms Center, 5801 Tabor Avenue, Philadelphia, Pennsylvania 19120.)
New England Biolabs Catalog. 1994. DNA/RNA Modifying enzymes: Vent DNA polymerase and Deep vent DNA polymerase for high fidelity and thermostability during thermal cycle DNA sequencing. Beverly, Massachusetts: New England Biolabs, Inc.
NRC (National Research Council). 1989. Our Seabed Frontiers: Challenges and Opportunities. Marine Board, NRC. Washington, D.C.: National Academy Press.
NRC. 1993. Applications of Analytical Chemistry to Oceanic Carbon Cycle Studies. Committee on Oceanic Carbon. Ocean Studies Board, National Research Council. Washington, D.C.: National Academy Press.
NRC. 1995. Understanding Marine Biodiversity: A Research Agenda for the Nation. Committee on Biological Diversity in Marine Systems. Ocean Studies Board, National Research Council. Washington, D.C.: National Academy Press.
OTA (Office of Technology Assessment). 1995. Nuclear Wastes in the Arctic: An Analysis of Arctic and Other Regional Impacts from Soviet Nuclear Contamination. OTA-ENV-623. Washington, D.C.: U.S. Government Printing Office.
Piccard, J., and R.S. Dietz. 1960. Seven Miles Down. New York: G.P. Putnams.
Pilskaln, C.H., M.W. Silver, D.L. Davis, K.M. Murphy, B. Gritton, S. Lowder, and S. Lewis. 1991. A quantitative study of marine aggregates in the mid-water column using specialized ROV instrumentation. Pp. 1175–1182 in Volume 2 Proceedings Oceans '91 held October 1–3, 1991 in Honolulu, Hawaii. Pisactaway, New Jersey: IEEE Service Center.
Rabalais, N.N., R.E. Turner, D.E. Harper, Jr., and Q. Dortch. 1991. The use of remote and electronic surveillance to evaluate the Impacts of Hypoxia on Fisheries Resources. Pp. 5-77-5-80 in 1991 Annual Report submitted to NOAA's Office of Undersea Research by NOAA's National Undersea Research Center at the University of North Carolina. Wilmington, North Carolina: University of North Carolina.
Rabalais, N.N., D.E. Harper, Jr., R.E. Turner, and N.H. Marcus. 1992. Impacts of hypoxia/anoxia on living resources. Pp. 5-125-5-128 in 1992 Annual Report submitted to NOAA's Office of Undersea Research by NOAA's National Undersea Research Center at the University of North Carolina. Wilmington, North Carolina: University of North Carolina.
Robison, B.H. 1993. New technologies for sanctuary research. Oceanus 36(3):75–80.
Robison, B.H. 1995. Light in the ocean's mid-waters. Scientific American 273(1):60–64.
Scholin, C.A., M.C. Villac, K.R. Buck, J.M. Krupp, D.A. Powers, G.A. Fryxell, and F.P. Chavez. 1994. Ribosomal DNA sequences discriminate among toxic and non-toxic Pseudonitchia species. Natural Toxins 2(4):152–165.
Seymour, R.J., D.R. Blidberg, C.P. Brancart, L.L. Gentry, A.N. Kalvaitis, M.L. Lee, J.B. Mooney, and D. Walsh. 1994. World Technology Evaluation Center Program. Pp. 150–262 in World Technology Evaluation Center Panel Report on Research Submersibles and Undersea Technologies. NTIS Report No. PB94-184843. Baltimore, Maryland: Loyola College of Maryland.
Sieburth, J.M. 1989. Are Aureococcus and other nuisance algal blooms selectively enriched by the runoff of turf chemicals? Pp. 779–784 in Novel Phytoplankton Blooms: Causes and Impacts of Recurrent Brown Tides and Other Unusual Blooms. E.M. Cosper, V.M. Bricelj, and E.J. Carpenter, eds. (Volume 35, Coastal and Estuarine Studies). New York: Springer-Verlag.
Smith, K.S., Jr. 1995. Scripps Institution of Oceanography. Personal communication to Dr. Mary Scranton, August 17, 1995.
Smith, T.J. 1992. SCARAB price performance—A study in efficiency. Pp. 57–61 in Proceedings of the 10th Annual Conference Intervention/ROV '92 held June 10–12, 1992, San Diego, California. Washington, D.C.: Marine Technology Society.
Stone, R. 1993. Déjà vu guides the way to new antimicrobial steroid. Science 259:1125.
Tucholke, B. 1995. Personal communication to Donald W. Perkins, November 9, 1995.
USCG (United States Coast Guard). 1994. Budget in Brief, Fiscal Year 1995. Washington, D.C.: U.S. Coast Guard.
UNOLS (University-National Oceanographic Laboratory System). 1994. The global abyss: An Assessment Deep Submergence Science in the United States. (Available from UNOLS, P.O. Box 392, Sanderstown, Rhode Island 02874 or e-mail: UNOLS@gso.uri.edu.)
Valent, P.K., and D.K. Young. 1995. Technical and economic assessment of storage on industrial waste on abyssal plains. Presented to Marine Board, National Research Council, June 21, 1995 at Stennis Space Center, Mississippi, May 25, 1995.
Van Dover, C.L., J.L. Grassle, B. Fry, R.H. Garritt, and V.R. Starczak. 1992. Stable isotope evidence for entry of sewage-derived organic material into a deep sea food web. Nature 360:153–156.
von Alt, C.J., and J.F. Grassle. 1992. LEO-15: An unmanned long-term environmental observatory. Pp. 849–854 of the Proceedings of Oceans '92 held October 26–29, 1992 in Newport, Rhode Island. Piscataway, New Jersey: IEEE Service Center.
von Alt, C., B. Allen, T. Austin, and R. Stokey, 1994. Remote environmental measuring units. Pp. 13–14 of the Proceedings of the IEEE Symposium on Autonomous Underwater Vehicles AUV '94 held July 1–19, 1994 at Cambridge, Massachusetts. Piscataway, New Jersey: IEEE.
Von Damm, K.L., J.M. Edmond, B. Grant, C.I. Measures, B. Walden, and R.F. Weiss. 1985. Chemistry of submarine hydrothermal solutions at 21 N. East Pacific Rise. Geochimica Cosmochimica Acta 49:2221–2237.
Widder, E.A., S.A. Bernstein, D.F. Bracher, J.F. Case, K.R. Reisenbichler, J.J. Torres, and B.H. Robison, 1989. Bioluminescence in the Monterey Submarine Canyon: Image analysis of video recordings from a mid-water submersible. Marine Biology 100:541–551.























