Unsteady Three-Dimensional Cross-Flow Separation Measurements on a Prolate Spheroid Undergoing Time-Dependent Maneuvers
T.Wetzel, R.Simpson (Virginia Polytechnic Institute and State University, USA)
Abstract
The flow over a 6:1 prolate spheroid undergoing transient maneuvers is studied. The Dynamic Plunge-Pitch-Roll (DyPPiR) model mount provides the unique capability to simulate truly unsteady maneuvers in a wind tunnel. The DyPPiR is presented along with several transducer systems used to study specific aspects of the spheroid flow field. The types of unsteady measurements performed include hot-film surface skin friction measurements, surface pressure measurements, and force and moment measurements. Time-dependent separation locations are measured successfully for the first time, as are time-dependent force and moment measurements. Steady and unsteady data are presented for each of these systems for two maneuvers: a 0° to 30°, 0.33 second (t'=11) pure ramp pitchup about the model center (Pitchup Maneuver); and a 0° to 13.5° pure pitchup about the model center that simulates the time dependent sideslip angle of a submarine entering a turning maneuver (Submarine Maneuver). These data are compared with steady data sets from this work and other researchers. This flow field is characterized by complex, three-dimensional cross-flow separations that are highly non-linear and are expected to have very complex time dependencies in unsteady flows. It is shown that, especially at higher angles of attack, significant lags occur in the flowfield during the maneuvers compared to the steady cases. In particular, separation is delayed at all locations of the model at up to 10° higher angle of attack in the unsteady maneuvers compared to the steady data. Equivalently, the separation structure during the unsteady maneuvers lag the steady data by from 1.5 to 4.5 non-dimensional time units (t'). The range of these time constants and the fact they are constant for neither the entire model or a given sensor shows for the first time the complex nature of the time dependency of three-dimensional crossflow separation. In addition, the normal force and pitch moment lag by about one t' time unit.
Nomenclature
1.
Introduction
1.1
Unsteady Aerodynamics
With recent efforts to expand submarine, aircraft, and ordinance dynamic performance beyond conventional regimes, the need for studying the truly unsteady, high excursion, and high Reynolds number flows has increased. Standard stability derivative
techniques fail to capture the non-linearities in such flows and CFD techniques cannot accurately compute the highly complex, separated flow fields of full vehicle geometries in steady conditions, let alone unsteady ones. Such methods are deficient because they lack physical models on which to base their computations that accurately describe the complexities of a time-dependent, turbulent, separated flow field. These models can only be developed with suitable experimental flow field data from sufficiently realistic flows. A new apparatus at Virginia Tech, the Dynamic Plunge-Pitch-Roll (DyPPiR) model mount, provides for the first time the capability to model truly time-dependent, high-excursion, high Reynolds number flows in a laboratory setting (1,2).
“Dynamic” testing has been an important part of design and validation of various types of craft for decades. Typically these techniques are only “quasi-steady”, relying on very small amplitude sinusoidal oscillations that can describe small-excursion maneuvers reasonably well (10). Even in these tests however, the measurements are usually limited to forces and moments. Seldom are flow field data taken in dynamic tests.
The DyPPiR is installed in Virginia Tech's 1.8m square Stability Wind Tunnel. The DyPPiR combines three 20.6 MPa hydraulic actuators to plunge a model through a 1.5m range vertically, pitch the model through a +/–45° range, and roll the model through a +/–140º range. Typical models are on the order of up to 2m long, and typical maneuvers last several tenths of a second. Even at Reynolds numbers of over 4 million the maneuvers are fast enough to exhibit significant unsteadiness. All degrees of freedom are digitally controlled by a personal computer, which allows the researcher to program not only sinusoidal trajectories, but more importantly, user-defined trajectories. Thus, the DyPPiR successfully fills the need of forcing a model to perform general, rapid, truly unsteady, high excursion, high Reynolds number maneuvers.
The DyPPiR has been used primarily to study submarine-like configurations. While some force and moment measurement capability has been developed for use with these configurations on the DyPPiR, the primary measurements made during DyPPiR tests are time-dependent surface pressure measurements and time-dependent, constant temperature surface hot-film measurements. The pressure measurements are useful in determining how unsteadiness affects the forces and moments and the structure of the vortical separations that form on the leeward side. The hot-film sensors are used to measure wall shear. Minima in the wall shear are interpreted as near separation locations. Thus, hot-film measurements provide the capability to study separation formation and migration during transient maneuvers.
To relate unsteady wind tunnel tests to real-time maneuvers, the time is non-dimensionalized by the time for flow to pass over a model, L/U∞ (8):
t′=tU∞/L (1)
Most parameters studied are related to the instantaneous angle of attack. The DyPPiR specifically sets a pitch actuator position during a maneuver. Since for all of the maneuvers studied the model is rotated about the model center, it can be stated that the DyPPiR pitch angle is equal to the instantaneous angle of attack of the model, referenced at the model center. Due to the rotational motion of the model, the instantaneous local angle of attack varies linearly from the nose to the tail of the model, with the nose being at a lower angle of attack than the model center and the tail being at a higher angle of attack than the model center. The magnitude of the local induced increment in angle of attack is a function of distance from the model center and rotational speed. In all cases studied here, these angle of attack increments, relative to the model center angle of attack, are less than 1.4° at the extreme nose and tail.
1.2
6:1 Prolate Spheroid
The prolate spheroid is an interesting geometry because although the body shape is very simple, the flow field is very complicated. In addition, the prolate spheroid flowfield carries over qualitatively to submarines, missiles, torpedoes, and to a certain extent aircraft fuselages. The prolate spheroid is a fairly well-documented flow. Other simple bodies that have been studied that are of interest are ellipsoid-cylinders and ogive cylinders. Until the present, all data taken on prolate spheroids has been steady. Wetzel (14) gives a brief overview of the steady prolate spheroid literature along with a detailed description of the steady flowfield. The prolate spheroid flowfield at angle of attack is characterized by massive crossflow separation that forms on the tail at low angles of attack and migrates windward and noseward at increasing angles of attack (2). The circumferential location of separation and even the separation topology are highly dependent on the state of the local boundary layer, that is, whether it is laminar, transitional, or turbulent. In all tests in this report, trip strips at x/L=0.20 guaranteed a relatively Reynolds number-insensitive separation over the rear 80% of the model. The separation on the nose, however, was governed by the laminar flow upstream of the trips. Here, at high angles of attack, the laminar flow will separate, undergo transition, reattach, and re-separate as a second, turbulent separation. These two separation lines merge downstream of the trip strips (14).
1.3
Overview of Present Research Program
The present work represents the first unsteady data taken on the DyPPiR at Virginia Tech. The focus up
through this report has been placed on making the DyPPiR fully operational and developing the measurement systems necessary to support DyPPiR experiments. These measurement systems include surface hot-film measurements, surface pressure measurements, and force and moment measurements.
With this present work as a basis, the DyPPiR is intended to provide a platform to study truly unsteady aerodynamics on a wide range of vehicles. The emphasis will be placed on high Reynolds number, high speed, high excursion maneuvers that are characterized by massive flow separations. The data obtained by DyPPiR experiments will provide data sets upon which to base unsteady models of the separation process in these flows. For example, by having the capability to measure separation location as a function of time, one can potentially develop a model describing that time dependency as a function of non-dimensional maneuver pitch rate. In addition to developing new models, the DyPPiR will be used to test existing models, particularly those for stability derivates, and determine their applicability. As an example of this type of test, the DyPPiR can be used to determine all lateral and longitudinal stability derivatives for a given model. The DyPPiR can then be used to perform several general maneuvers, measuring the forces and moments during those maneuvers, and compare the measured forces and moments to those predicted by the stability derivatives. The DyPPiR represents a truly unique capability in its ability to perform these general time-dependent maneuvers.
2.
Dynamic Plunge-Pitch-Roll Model Mount (DyPPiR)
2.1
Stability and Control Wind Tunnel
The DyPPiR is installed in the Virginia Tech 1.8m×1.8m Stability and Control Wind Tunnel. The Stability Tunnel is a closed return, closed test section, subsonic facility with a speed range of over 60 m/s. Turning vanes, screens, and a 9:1 contraction ratio inlet nozzle reduce the free-stream turbulence to less than 0.03% (6). The fan is powered by a 450 kW DC motor. For these tests, the tunnel speed, and thus non-dimensional time, was held constant at 45.7 m/s. Because the tunnel temperature is essentially ambient, the Reynolds number was thus allowed to vary as much as +/–5%.
2.2
DyPPiR Hardware Overview
The Dynamic Plunge-Pitch-Roll (DyPPiR) Model Mount (Figure 2) was designed to provide the unique capability of performing general, high-excursion, large-scale, high Reynolds number, truly unsteady maneuvers (1,2). The DyPPiR has three degrees of freedom: 1.5m vertical plunge; +/–45° pitch; and 280° roll. The DyPPiR is designed to carry models up to 2m or more in length and up to 45 kg of mass. Three 20.6 MPa actuators provide the power required to force 45 kg of model and over 250 kg of DyPPiR hardware at rates approaching 9 m/s in plunge and over 90°/s in pitch. Most importantly, however, the DyPPiR is digitally controlled by a personal computer, so it is capable of performing general, pre-programmed maneuvers. It is not limited to sinusoids or fixed rate ramps. The nomenclature used for the three degrees of freedom, along with body nomenclature, are shown in Figure 3.
2.3
Maneuvers Tested
2.3.1
The 0.33s, 30° Ramp Pitchup
The Pitchup Maneuver, as it is referred to throughout this report, is a simple linear ramp from 0° to 30° in 0.33s. No specific acceleration or deceleration curves were programmed in. The objective is to get as abrupt a start and a stop as possible. The DyPPiR does, in any case, have a finite acceleration and deceleration capability. Figure 4 shows actual pitch angle position feedback taken during several hundred maneuver executions. The solid line is the mean over the ensemble, and the dotted lines delineate two-standard-deviation (2 σ) boundaries. The model is pitched about the model center, so the carriage has to be plunged roughly 70 cm during the maneuver to prevent the model center from moving. Figure 5 shows the plunge position feedback data for the same maneuvers. While it is possible to keep the model center from moving vertically during a maneuver, it is inevitable that the model center will translate downstream during a maneuver. This downstream movement is deemed insignificant compared to the tunnel speed (typically 45 m/s).
2.3.2
The 0.25s Submarine Maneuver
The Submarine Maneuver is modeled after data taken on a real submarine during the initial transient portion of a turning maneuver by researchers at the David Taylor Model Basin. For the DyPPiR tests, the Submarine Maneuver models the time history of the sideslip angle from the actual submarine tests (Figure 6). This is characterized by a ramp up to 13.5° with a slight overshoot. Also, the motion simulated on the DyPPiR is roughly half the speed in non-dimensional time units than the DTRC data set.
2.4
Model Geometry
All models tested were 1.372 m long 6:1 prolate spheroids with circular cross section (Figure 3). The maximum radius was 114 mm. The rearmost 38 mm was removed to allow for sting entry.
3.
Hot-Film Measurements
3.1
Theory of Operation
The surface skin-friction was measured with the hot film sensors designed and documented by Simpson et. al. (13). A detailed description of the sensors, their application to the model, and the instrumentation used to operate the sensors can be found in Wetzel (14). The sensors heat the near-wall fluid through forced convection. Due to the similarity between gradient transport of momentum and scalars (heat), the heat transfer into the fluid gives a measure of the wall shear. Simpson et al. (13) show that the mean film coefficient ![]() is proportional to the cube root of the near-wall velocity gradient, which is thus proportional to the wall shear:
is proportional to the cube root of the near-wall velocity gradient, which is thus proportional to the wall shear:
(2)
(3)
In this relation, ![]() is the time-mean heat transfer into the fluid, Tw is the wall (sensor) temperature, T∞ is the freestream temperature, N is a constant (1.12) from the mathematical analysis, k is the thermal conductivity, l and w describe the sensor size, α is the thermal diffusivity, and µ is the viscosity. Here, the main purpose of the sensors is not necessarily to measure the absolute magnitude of the wall shear or the skin friction coefficient, but to measure the relative shear distributions through measurements of the film coefficient to locate shear minima and thus separation locations. However, wall shear magnitudes are possible with adequate calibration.
is the time-mean heat transfer into the fluid, Tw is the wall (sensor) temperature, T∞ is the freestream temperature, N is a constant (1.12) from the mathematical analysis, k is the thermal conductivity, l and w describe the sensor size, α is the thermal diffusivity, and µ is the viscosity. Here, the main purpose of the sensors is not necessarily to measure the absolute magnitude of the wall shear or the skin friction coefficient, but to measure the relative shear distributions through measurements of the film coefficient to locate shear minima and thus separation locations. However, wall shear magnitudes are possible with adequate calibration.
In the same work, Simpson et. al. (13) show that the wall shear provides higher order information about the separation location than pressure by arguing that three-dimensional separations are characterized by high wall-normal velocity (V) components. By analyzing the continuity and momentum equations near the wall, Simpson et. al. (13) showed that
(4)
To use this equation rigorously, the entire wall shear direction and magnitude fields would need to be known in order to perform the divergence operation to compute the wall-normal velocity at all points on the body and determine separation location. The sensors used in the present experiment are only magnitude sensitive, eliminating the possibility of using the last equation. Instead, it is found in practice that separations occur near wall shear minima. Bellhouse and Schultz (4) show this phenomenon quite clearly in several circular cylinder flows. Wetzel (14) shows that in general the wall shear minima does not correspond exactly with separation location but instead typically lags separation by up to 10° circumferential position. The same work shows conclusively however that wall shear minima do in fact properly correlate separation location trends.
3.2
Experimental Apparatus And Uncertainties
For a detailed description of the apparatus and uncertainties, see Wetzel (14). Custom designed, directionally insensitive hot-film sensors were mounted at 12 locations along a lengthwise surface element: x/L=0.118, 0.194, 0.220, 0.271, 0.347, 0.424, 0.500, 0.576, 0.653, 0.729, 0.831, and 0.882. The sensors were each connected to non-linearized Miller (11) anemometers. The DyPPiR roll actuator was used to position this strip at specific circumferential locations from ![]() =0° to
=0° to ![]() =180° to map the circumferential skin friction distributions. A data acquisition board in a personal computer was used to read the sensor voltages. Tunnel temperature, total pressure, and dynamic pressure were all measured as well, as were DyPPiR positional outputs.
=180° to map the circumferential skin friction distributions. A data acquisition board in a personal computer was used to read the sensor voltages. Tunnel temperature, total pressure, and dynamic pressure were all measured as well, as were DyPPiR positional outputs.
The relative uncertainty between two measurements made by a given sensor, and thus the relative uncertainty between any two measurements presented in a given circumferential distribution, is 5%. Due to calibration uncertainties, the uncertainty between any measurements made by two different sensors (and thus at two different axial model stations) is 20%. This latter uncertainty is unimportant, however, since circumferential distributions of skin friction are used to determine separation locations and are thus governed by the former 5% uncertainty. Due to low frequency response and large sensor size (5 mm), the sensors are insensitive to high frequency, small scale, turbulent fluctuations. The frequency response is high enough (200 Hz) for the sensors to accurately track temporal changes in the time-mean skin friction values.
3.3
Steady Results
Figure 7 shows typical results from both the constant temperature measurements and some measurements made with a different set of sensors connected to constant current anemometers. The agreement between the two data sets is excellent. In this case (α=10°, x/L=0.77) the minima, indicating a primary separation, occurs at ![]() =135°.
=135°.
Figure 8 and Figure 9 show the constant temperature skin friction coefficients superimposed on top of secondary streamlines determined by Chesnakas and Simpson (5) from detailed laser Doppler anemometer measurements. It is important to note that the skin friction values are not in scale, but the streamline plots
are in scale. In fact, the secondary streamline plots represent data taken up to approximately 3 cm away from the wall and thus represents the near-wall flow field in these separated zones. The radial grid lines represent locations where the LDV data were actually taken, therefore separation uncertainties in this data set are limited by the 5° spacing of the profile locations. Each profile contains 17 points spaced logarithmically down to 0.007 cm from the wall, corresponding to y+ values on the order of 7. In all cases, it is seen that the wall shear minimum qualitatively corresponds to the separation location. In fact, the wall shear minima seems to consistently lag the separation location by around 5°, although considering the positional uncertainties in both data sets, the true size of this lag is difficult to measure. Exactly where the separation is located in the streamline plots is subject to some subjectivity. In any case, the flow minima seems to consistently lag the visible flow separation streamline, and this fact is consistent with the findings of Chesnakas and Simpson (5).
Figure 10 shows circumferential skin friction distributions over the length of the model for α=15.2°. At the rearmost sensor (x/L=0.882), two minima are seen, indicating a primary and secondary separation. The secondary separation only extends up to x/L=0.729. Upstream the primary separation minima are located farther leeward and are weaker. The distribution at x/L=0.220 is very irregular due to the fact that this sensor was immediately downstream of the trip posts, where the flow had not completed transition.
Figure 11 shows how the circumferential skin friction distributions at one location (x/L=0.729) vary with angle of attack. At this location, a minimum indicating primary separation is first evident at α=12.2°. This minimum grows in strength and moves windward as angle of attack increases. A second minimum, indicating secondary separation, is fully developed by α=17.6°. It too grows in strength at increasing angle of attack but remains in roughly the same circumferential location.
The locus of the minima in these distributions for each axial station decribes the separation topology. Figure 12 shows such a separation topology with the separation lines determined from both constant temperature and constant current data sets. At this angle of attack (20°), two separations are evident on the nose due to a laminar separation that undergoes transition, reattaches, and re-separates as a turbulent separation. Also, a strong secondary separation extends over the rear 40% of the model length. The agreement between the constant temperature and constant current datasets is excellent.
Figure 13 shows the primary separation locations as a function of angle of attack for each of the 12 constant temperature measurement stations. In all cases except for the nose stations, the separation moves windward at increasing angles of attack, but eventually levels out at some windward-most circumferential location.
3.4
Unsteady Results
3.4.1
Pitchup Maneuver
Figure 14 shows the circumferential skin friction distributions for x/L=0.729 at discreet time steps during the pitchup maneuver. Time increases from bottom to top in these plots, and the range of time encompassed by a given plot column is indicated in the top of each column. The flow is essentially attached at the first time step (t'=6.0), but a primary separation is formed by the top of the first column (t'=8.87). Similarly, a secondary separation is formed by the top of the second column in Figure 14 (t'=11.87).
Again, the minima can be located for each time step and the separation location can be plotted versus time. Figure 15 shows an example of such a plot for x/L=0.729. The primary separations lag the steady data significantly, by as much as 1.5 to 4.5 t' units.
Figure 16 shows a comparison of separation lines at 17.6° for both the pitchup maneuver and the steady data. It is clear that the primary separation line in the pitchup maneuver lags the steady separation line by as much as 10° in circumferential position, and while the steady data show a strong, well-developed secondary separation line, no such secondary line exists in the unsteady data.
3.4.2
Submarine Maneuver
Figure 17 shows circumferential skin friction distributions for discrete time steps during the submarine maneuver, but this time at x/L=0.831. Again, there is no separation at the bottom of the left column in Figure 17 (t'=6.0), but a separation has formed by the top of that first column (t'=8.87). Variations produced by separation grow throughout the rest of Figure 17.
Figure 18 shows the time history of the separation location at x/L=0.729. This plot is not as informative as the equivalent plots in the pitchup maneuver due to the low number of steady data points for these low angles of attack, but a lag in separation formation is still evident.
Figure 19 to Figure 21 show direct comparisons between steady circumferential skin friction distributions and unsteady ones for x/L=0.729. Figure 19 shows data for both the pitchup and submarine maneuvers compared with steady data at an angle of attack of 12.2°. In the steady data, a clear primary separation exists at ϕ=135°, but no separation is seen in either the pitchup or submarine maneuver at the instant the model reaches this angle of attack. The data from the last recorded time taken during the submarine maneuver, which occurs t'=20 after the model has come to rest,
shows that the flow has essentially regained a steady-state condition. Figure 20 shows a comparison of the pitchup maneuver at 20° angle of attack with equivalent steady data. In this case, the steady data show both a primary and secondary separation, while the unsteady distribution shows only a primary separation which is more leeward than the steady primary separation. This shows that in unsteady flows the separation location topology itself can be very different than in an equivalent steady configuration. Figure 21 shows the pitchup maneuver at 29.9° and at the end of the time record (t'=11 time units after the model has come to rest). In this case, both the steady and unsteady data show primary and secondary separations, but the positions are more leeward by roughly 10°. Again, by the end of the time record, the flow has essentially reached steady state.
4.
Pressure Measurements
4.1
Experimental Apparatus and Uncertainties
Model wall pressure taps were installed in the prolate spheroid model in a longitudinal row at 10 locations: x/L=0.00, 0.11, 0.23, 0.31, 0.44, 0.56, 0.69, 0.77, 0.83, and 0.90. A brass plug with a 0.74 mm diameter pinhole was mounted flush to the model surface at each location. Endevco 8510B-2 miniature pressure transducers were mounted in these plugs. A detailed description of the pressure transducer system is contained in Wetzel (14).
The model was rolled to various orientations in order to sweep the transducers from the windward to the leeward sides to map out the pressure distribution over the model surface. The flow was assumed to be symmetric in the ensemble mean, so data were only taken on one half of the model.
The unsteady data were sampled at 2000 Hz. Data were taken at every 10° roll on the windward side and every 5° on the leeward side. Fifty ensembles were taken at each roll angle.
The pressure differences measured by the transducers were non-dimensionalized by the freestream dynamic pressure forming the standard definition of the pressure coefficient:
Cp=(p–ps)/q∞ (5)
Pressure coefficient uncertainties are on the order of +/– 13% (14), and thus preclude accurate quantization of the differences between steady and unsteady data. For this reason, only steady data are presented.
4.2
Steady Results
Figure 22 shows typical steady circumferential pressure distributions for the model at α=14.9°. The data (solid lines) are compared to the potential solution (dotted lines) at the same angle of attack. While the potential solution matches the data reasonably well on the nose, the data on the tail obviously don't match well due to the flow separation at this angle of attack.
Figure 23 shows the sectional lift coefficients Cl (as calculated using pressure data) for each of the nine stations as a function of angle of attack. The sectional lift coefficients were computed by integrating the circumferential pressure distributions at each station where surface pressure was measured (14). It is interesting to note that most of the lift is generated by the nose and not the separated tail. In fact, the tail region actually has a small but significant downforce. The highly accelerated fluid on the windward side near the tail provides a large amount of windward suction, while the separation region is stagnant enough as to produce no noticeable suction at all.
5.
Forces and Moments
5.1
Introduction
Unsteady forces and moments will eventually become the staple measurement made on the DyPPiR, much as it is in steady wind tunnel testing, because the data describe a global effect of the aerodynamics on the model and as such provides much information in a small number of runs. This contrasts with surface parameters, such as pressure and skin friction, which require one or more orders of magnitude more runs in order to get enough data to map out the data over the entire surface, or flow field measurements that require another order of magnitude in order to piece together the topology of a three-dimensional space. Steady force and moment data are difficult enough to acquire with precision. Unsteady force and moment measurements are more difficult to make, especially compared to pressure and skin friction.
5.2
Two-point Balance and Light-weight Model
Several iterations of balance and model construction have been developed as the DyPPiR unsteady force and moment measurement methodology has matured. Details of the chronology of this development are contained in Wetzel (14). The first iteration utilized a standard stingmounted bending beam strain gage balance. Inertial loads dominated the aerodynamic loads due to the mass of the 23 kg model, and the balance output consisted primarily of oscillatory response due to the relatively low dynamic stiffness of the balance geometry. It was eventually found that the common paradigm of a sturdy, heavy wind tunnel model coupled with a bending-beam type of balance must be abandoned for sensitive unsteady DyPPiR force and moment measurements.
The first change made was to replace the heavy fiberglass and aluminum model with a much lighter composite one. A composite sandwich construction was used consisting of a foam core surrounded by thin layers
of carbon fiber cloth (Figure 24). The model was left completely hollow except for the sting mounting hardware. The model was made in two symmetric top and bottom halves. The final weight was roughly 2.3 kg, a savings of an order of magnitude over the previous iteration. Many of the design details for the model structure can be found in Roback (12).
The solution to the balance problem rests on greatly increasing balance stiffness without decreasing sensitivity. The bending-beam type of balance system is completely incapable of meeting these requirements. A configuration more suitable is the type used at the David Taylor Research Center for very large scale, static and quasi-steady, sting-mount submarine hydrodynamic testing (3). In these tests, the models are mounted to the sting by two sets of load cells that are separated by a large distance, with one set of load cells in the forward half of the model and the second set in the aft model half. Strain-based load transducers in general have small deflections of displacements when under load. However, while bending beam sting-mounted balances used in many wind tunnel tests may bend by only a fraction of a degree, this translates into many millimeters at the model tips. If the transducers are placed at each model end, as they are in tests at DTRC, then each end can only move by a fraction of a millimeter, and overall system stiffness is greatly enhanced.
To test this concept on the DyPPiR, a two component system was constructed using Transducer Techniques MLP-50 200 N single component load cells (Figure 25). A key to the success of this system is that the load cells be mounted to the sting or model with low-friction pivots instead of rigid mounts. This prevents the sting or model structures from absorbing any of the moments acting on the model. These pinned mounts were provided by using hardened steel dowel rods fitted very closely in brass inserts. The pivots were mounted on a robust aluminum channel that was attached to the sting. Solid carbon fiber inserts 10 mm thick were molded into the model skin to provide a very stiff, light weight, and precise mounting surface for the load cells. This system proved to be very stiff in normal force and pitch moment.
However, the system was much less stiff in roll because the load cells were not designed to withstand moments. The model could vibrate slightly in roll, and the load cell is sensitive to such an out-of-plane load. Thus, while results are not free from corrupting oscillations, they provide insight into the fluid dynamics of the unsteady maneuvers, as well as point toward the next iteration. Data were again taken with both the wind off, as a tare, and the wind on. 50 ensembles of each the wind-on and wind-off cases were obtained and averaged for each maneuver. The results from these tests are presented below.
5.3
Steady Results
Figure 26 shows the steady normal force and pitch moment coefficients for the prolate spheroid at various angles of attack up to 35°. Details of the reduction and uncertainty determination are contained in Wetzel (14). The full-scale uncertainty of the normal force coefficient is less than +/–1.5%, or δCZ=0.015, while the pitch moment coefficient is also accurate to less than +/–1.5% full scale, or δCM=0.0035.
The data are compared with the data of Ahn (2), which are stated to have a +/–7.5% uncertainty on the normal force and +/–15% uncertainty on the pitch moment. The two data sets agree to within the stated uncertainties on Ahn's data. The data were primarily taken with increasing angles of attack. However, several data points were repeated going back down (these are on the plot), and these were found to be repeatable to within the stated uncertainty of 1.5% full scale. While the normal force coefficient increases at greater rates at the higher angles of attack, the pitch moment settles in at a relatively constant slope at around α=10°.
5.4
Unsteady Results
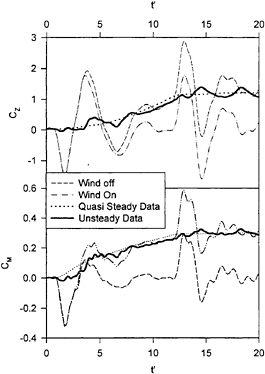
The normal force and pitch moments for the pitchup maneuver are shown in Figure 27. The oscillations, while small, do make it difficult to discern the trends in the lower angles of attack of the ramp. However, there is a definite lag in both the unsteady normal force and pitch moment. The dynamic distortions seem to be due mainly to a low frequency (roughly 6 Hz damped sine wave) signal component that exists in the wind on and wind off data. These damped oscillations are caused by the inertial impulse imparted on the model-balance system by the DyPPiR as it accelerates the model from rest into a steady ramp, and again as the DyPPiR decelerates the model back to rest at the end of the maneuver. The natural frequency of the load cell in a normal load mode is 2500 Hz, which is well above this observed frequency. During the maneuvers the model exhibited roll oscillations. It was soon determined that the model/load-cell system was much less stiff in roll than in normal force/pitch moment. This is due to the fact that the load cells are not designed to withstand bending moments and the fact that the mounting area provided by the load cell consisted of only one bolt, which is adequate for a normal load but not adequate for a bending moment. Therefore, the low frequency oscillations are due to secondary roll oscillations of the model relative to the sting. The load cells are not designed to cancel out bending moments, so such loads imparted on the load cell corrupt the voltage output of the load cells.
In computing the aerodynamic loads, the wind-off force and moment time series is subtracted from the wind-on time series. The intent is that the undesired
inertial loads will be identical for both the wind-off and wind-on cases and thus subtract out exactly. Since these loads are the same order of magnitude as the aerodynamic loads, it can be expected that small errors in the repeatability of the inertial loads will corrupt the computed aerodynamic loads. The undesired loads, which includes mostly inertial loads imparted by the DyPPiR on the model but can also include the very small aerodynamic loads experienced during the wind-off tare runs, are actually slightly different from the wind-off case to the wind-on case. This is due to the small but significant loading effect of the aerodynamic forces and moments on the performance of the DyPPiR. It is important to stress that overall this effect should be small, at least as seen by the DyPPiR, since the DyPPiR force capacity is much much larger than the aerodynamic forces generated by the prolate spheroid model. However small these inertial loads are, it is also important to remember that they are inputs to a dynamical system, and that these small changes in the system inputs can have a more visible, amplified effect on the time series of the system output (7). As such, the low frequency oscillations that do corrupt the aerodynamic force and moment signals are relatively small. It is shown in the next section that the way to eliminate these distortions altogether is to design load cells that are very stiff in all modes of vibration (including roll), thus increasing the natural frequency of all modes to the point that damped sine oscillations no longer exist, and all that remains are actual measured loads, be they inertial or aerodynamic.
Several attempts were made to eliminate these distortions from the aerodynamic signals. The response of the load cells was modeled with second-order dynamic system impulse responses, but it was found that these did not come close to adequately modeling the oscillations for the precision required. The distortions in the final signals themselves were modeled as damped sine waves (outputs from a second order system given an impulsive input). These too did not faithfully eliminate the distortion, and required arbitrarily-selected parameters to come even close to matching the distortions. Finally, the wind-on and wind-off data were time-shifted relative to each other, but this also did not eliminate the distortions, the distortions can only be eliminated with properly designed hardware and not with any data post-processing.
Despite the presence of these dynamics, the lag in the unsteady forces and moments is due to unsteadiness in the flow. Wetzel (14) shows that the maximum time lag that can be attributed to the balance dynamics is 0.03 t'. The lags in the plots are on the order of one time unit. Therefore, these lags cannot be due to system dynamics and must be due to actual lags in the flow field. This analysis is very important, as it establishes for the first time a force and moment capability on the DyPPiR that adequately resolves flow-field lags from balance-induced dynamical effects.
It is also desirable to assess the potential impact of added mass forces and moments on the unsteady forces and moments during this maneuver. The force due to added mass is the product of any model acceleration relative to the freestream and some proportion of the mass (or inertia for rotational degrees of freedom) of the air displaced by the model (9). Details of the estimates of the added mass effects are contained in Wetzel (14). It was found that while added mass effects are small, they are at least the order of magnitude of the differences between the steady and unsteady forces and moments. There is an added mass component due to the impulsive accelerations at the beginning and end of the maneuvers. This added mass affect is present in both the wind on and wind off cases, but has a very limited temporal extent (21). The most significant added mass effect felt by the model is a relatively constant force due to the fact that the crossflow velocity is changing (going from zero to some finite value) while it is pitching; this added mass force is present only during the wind-on cases. This change in crossflow velocity is an acceleration and is expressed simply as:
(6)
This is due to a rotation of the free stream relative to the model and is thus present during the entire ramp portion of the maneuver. Since the ramp is at a constant angular rate, there is no similar angular flow acceleration during the maneuver. It is shown in Wetzel (14) that the magnitude of these added mass effects, in terms of non-dimensional normal force coefficients, is δCz, added mass=0.047. This is three times the stated uncertainty of 0.015. It is also shown in Wetzel (14) that this acceleration results in a higher normal force than the steady data. This is opposite the trend seen, that is, that the unsteady force is smaller than the steady force. Therefore, there are two opposing unsteady components: an added mass effect, which tends to increase the normal force (or equivalently a time lead), and a delayed separation process which tends to decrease the normal force (or introduce a time lag in the flow).
The added mass effect perhaps explains why the lags in the force and moment data are smaller than the lags in the separation location data. The added mass effect is such that a larger, not smaller, normal force should be generated. This is equivalent to the unsteady data leading the steady data, or the added mass resulting in a leading time constant. Using an estimated ∂CZ/∂t' slope of 0.11 from Figure 27, a 0.047 positive shift in the
normal force is equivalent to a 0.4 t' lead. This may mean the effective force and moment lag of the flow field, minus added mass effects, is higher than the 1 t' time unit shown and may be as high as 1.4 t' time units. Wetzel (14) also shows that the pitch moment added mass effects are insignificant.
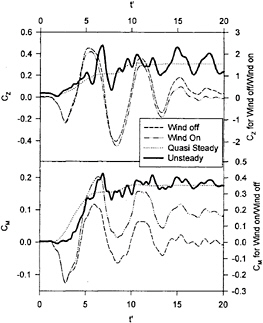
Figure 28 shows the normal force and pitch moment, respectively, for the submarine maneuver. The trends are much less clear in this maneuver than in the pitchup maneuver due to the lower relative aerodynamic forces and moments for this lower-excursion maneuver. Dynamic distortion is much lower at the start of this maneuver due to the lower accelerations imparted at the gentle initiation of this maneuver. However, the accelerations at the end of the maneuver are large and result in a significant stopping oscillation. The lags in the pitch moment are actually larger in this maneuver compared to the pitchup maneuver, but the normal force lags are smaller. However, such distinction in lag magnitude is hampered by the relative level of the force and moment uncertainties.
5.5
Future Improvements
Two main goals remain to be reached before a viable, robust force and moment measurement system is in place on the DyPPiR. The first is to improve signal fidelity. As demonstrated in section 5.2 this can be further improved by reducing the model weight, but will be most improved by increasing the balance stiffness. It was learned in the last generation balance that system stiffness is required in all possible degrees of freedom. In the case of the two-point balance system, a limiting condition was the fact that the load cells were not stiff in roll. During the summer of 1996 custom-designed load cells provided higher stiffness through better geometric design. Also, the strain gages were laid out in such a way as to minimize interactions from any off-axis loads. Wetzel (14) shows that such design changes will result in a load cell two orders-of-magnitude suffer in all directions than the MLP-50.
As of August of 1996, a new set of load cells embracing these ideas was completed. The new load cells have demonstrated significantly higher roll stiffness through both a wider construction and a wider, 4-point mounting pad that replaces the weak, single-bolt mounting of the MLP-50 load cells. In addition, the low-friction pivots that mount the load cells to the sting were re-designed to be larger, suffer, more precise, and carry even less friction. Data from this system will be included in Wetzel and Simpson (15).
The second major goal that still needs to be achieved is to obtain all six force and moment components instead of just two. To measure side force and yaw moment in addition to normal force and pitch moment requires twice as many gages, and, more importantly, a two-degree-of-freedom gimbaled mount for each load cell pair. These are challenging to design on such a small scale, but are achievable. What is more difficult is measuring axial force and roll moment without compromising balance stiffness. The load cells are oriented longitudinally relative to the model, so all forces and moments measured perpendicular to the longitudinal axis are inherently stiff as shown in the DTRC system (3). The two components parallel to such an axis can not similarly benefit from the two-point configuration.
6.
Discussion
The two maneuvers presented here represent non-dimensionally slow maneuvers, and thus the unsteadiness is subtle. In all cases the unsteady data lag the steady data. The separation locations lag both in formation and migration but do converge to the steady state case after the end of the maneuver (see Figure 15 and Figure 18). During the maneuver, the separations can lag the steady separations by as much as 15°. Perhaps more important is the associated time lag, which can range from 1.5 to 4.5 time units. These time lags are neither identical nor constant for each model location, thus pointing to the overwhelming complexity not only of a three dimensional separation but also of its time-dependent formation. Pending the development of a more robust, next-generation separation location system based on these findings, one could study in great detail the parametric effects of pitch rate, pitch range, pitch direction (up or down), Reynolds number, center of rotation, and even pitch maneuver shape (such as using the submarine maneuver or any imaginable maneuver) on the separation formation and migration. Such data could lead to dynamical models of unsteady separation on axisymmetric bodies.
The lagging separation locations implies lagging normal force and pitch moment. The force and moment data obtained with the two point balance supports these trends (Figure 27 and Figure 28). The force and moment lags are much smaller than the separation location lags in general. This may be due to the fact that the majority of the normal force and pitch moment is generated by the attached nose flow, which also exhibited the least amount of flow unsteadiness. So while the crossflow separation on the rear two-thirds of the model is significantly affected by the model motion, the delay in separation at the tail plays less of a role in lagging the forces and moments. Also, added mass effects contribute to lower time lags. Again, more robust systems will allow one to determine not only whether the unsteady aerodynamics lead or lag the steady data, but will also bring out more specific details about the processes involved and point to improved dynamical models.
7.
Conclusions
Some features of steady and unsteady flow over a 6:1 prolate spheroid were measured experimentally. All tests were conducted at Re=4.2 million. Trip strips were located on the model at x/L=0.20. The steady flowfield was established with surface pressure measurements, hot-film surface skin-friction measurements, and force and moment measurements. Hot-film and force and moment measurements were made on the model in two maneuvers. The hot-film data showed definite lags in the formation and migration of the separation line for the pitchup maneuver, but showed much weaker trends for the submarine maneuver due to the much weaker separations at the lower angles of attack. Separation formation occured 1.5 to 4.5 time units later during the maneuvers compared to the steady data. An ultra-stiff, two point balance was successfully implemented for measuring unsteady force and moments, along with a very light-weight composite model. The force and moment data again shows definite lags at the higher angles of attack of the pitchup maneuver in both normal force and pitch moment, but shows only pitch moment lags during the submarine maneuver.
Acknowledgements
The authors are grateful for the years of encouragement and support by James A.Fein of the Office of Naval Research, and contracts N00014 –87-K-0816, N00014–91-J-1732, and N00014–95-I-0101. We would also like to acknowledge Jon L.Fleming for his assistance in running the DyPPiR and the Wind Tunnel.
References
1. Ahn, S., Choi, K.Y., and Simpson, R.L., “The Design and Development of a Dynamic Plunge-Pitch-Roll Model Mount ”, AIAA-89–0048, AIAA 27th Aerospace Sciences Meeting, Reno, NV, 1989.
2. Ahn, S., An Experimental Study of Flow Over a 6 to 1 Prolate Spheroid at Incidence, Dissertation, Virginia Polytechnic Institute and State University Aerospace Engineering Department, 1992.
3. Bedel, J., David Taylor Research Center, Bethesda, MD, Private Discussion, 1996.
4. Bellhouse, B.J., and Schultz, D.L., “Determination of Mean and Dynamic Skin Friction Separation and Transition in Low-Speed Flow with a Thin-Film Heated Element”, Journal of Fluid Mechanics, vol. 24, part 2, pp. 379–400, 1966.
5. Chesnakas, C.J., and Simpson, R.L., “A Detailed Investigation of the 3-D Separation about a 6:1 Prolate Spheroid at Angle of Attack” , AIAA-96–0320, 34th Aerospace Sciences Meeting and Exhibit, Reno, NV., 1996.
6. Choi, K. and Simpson, R.L., Some Mean Velocity, Turbulence, and Unsteadiness Characteristics of the VPI&SU Stability Wind Tunnel, Virginia Polytechnic Institute and State University, Aerospace and Ocean Engineering Dept. Report VPI-AOE-161, 1987.
7. Doeblin, Ernest O., Measurement Systems: Application and Design, McGraw-Hill Publishing Company, New York, N.Y., 1990.
8. Etkin, B., Dynamics of Atmospheric Flight, John Wiley & Sons, New York, N.Y., 1972
9. Lamb, H., Hydrodynamics, Dover Publications, New York, N.Y., p. 155, 1945.
10. McCroskey, W.J., “Some Current Research in Unsteady Fluid Dynamics”, Journal of Fluids Engineering, Vol. 99, pp. 8–39, 1977.
11. Miller, James A., “A Simple Linearized Hot-Wire Anemometer”, Journal of Fluids Engineering, December, 1976.
12. Roback, V.E., “Design and Development of a Graphite/Epoxy 6:1 Prolate Spheroid Wind Tunnel Model for Use in Time-Dependent Force and Moment Tests”, 1995 AIAA Mid-Atlantic Student Conference, submitted to DTIC for distribution, 1995
13. Simpson, R.L., Walker, D.A., and Shinpaugh, K.A., Description of a 1000 Sensor Constant Current Anemometer System for Locating Three-Dimensional Turbulent Boundary Layer Separations”, Virginia Polytechnic Institute and State University, Aerospace and Ocean Engineering, Report VPI-AOE-185, 1991.
14. Wetzel, T.G., Unsteady Flow Over a 6:1 Prolate Spheroid, Dissertation, Virginia Polytechnic Institute and State University, Aerospace and Ocean Engineering, 1996.
15. Wetzel, T.G. and Simpson, R.L., “Unsteady Three-Dimensional Cross Flow Separation Measurements on a Prolate Spheroid Undergoing Time-Dependent Maneuvers”, AIAA-97–0618, AIAA 35th Aerospace Sciences Meeting, Reno, NV, 1997.
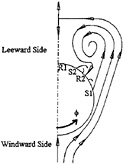
Figure 1. Simplified flow separation topology for the secondary streamlines in a plane normal to the major axis of an axisymmetric body. S1 and S2 refer to primary and secondary separation locations, respectively, and R1 and R2 refer to primary and secondary reattachment locations.
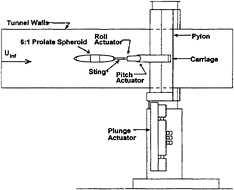
Figure 2. Dynamic Plunge-Pitch-Roll (DyPPiR) Model Mount installed in wind tunnel.
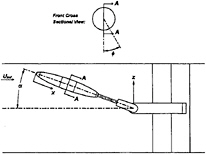
Figure 3. Coordinate Nomenclature. x is measured from the nose; ![]() is the circumferential location measured from the windward line of symmetry; z is the plunge ordinate; and α is the pitch angle and equivalently the model center angle of attack.
is the circumferential location measured from the windward line of symmetry; z is the plunge ordinate; and α is the pitch angle and equivalently the model center angle of attack.
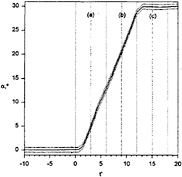
Figure 4. Pitch-up maneuver pitch angle position feedback. Dotted lines represent 20:1 odds positional repeatability.
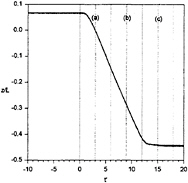
Figure 5. Pitch-up maneuver plunge position feedback. Dotted lines represent 20:1 odds positional repeatability.
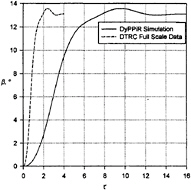
Figure 6. Submarine maneuver pitch angle command signal compared to data from DTMB sideslip data.
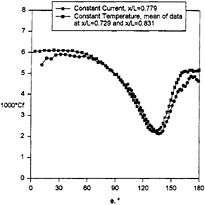
Figure 7. Comparison of stead flow skin friction magnitudes (both constant temperature and constant current) at x/L=0.77, α=10°, and Re=4.2 million.
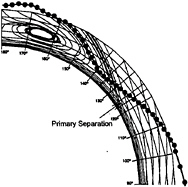
Figure 8. Steady flow skin friction values superimposed on secondary streamlines from Chesnakas and Simpson (5) at x/L=0.77 and α=10°.
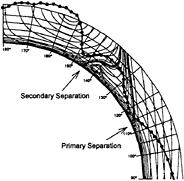
Figure 9. Steady flow skin friction values superimposed on secondary streamlines from Chesnakas and Simpson (5) at x/L=0.77 and α=20°.
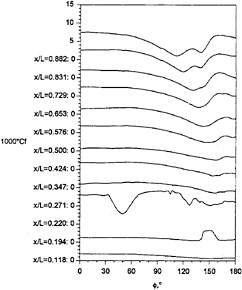
Figure 10. Steady flow Cf vs. ![]() for all x/L, α=15.2°
for all x/L, α=15.2°
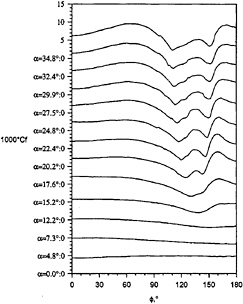
Figure 11. Steady flow Cf vs. ![]() for all α, x/L=0.729.
for all α, x/L=0.729.
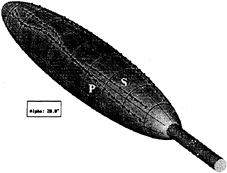
Figure 12. Comparison of constant current and constant temperature separation location topology on leeside for α=20°. Solid lines are steady constant current data. Dashed lines are steady constant temperature data. “P” indicates primary separation, while “S” indicates secondary separation.
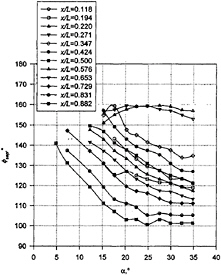
Figure 13. Constant temperature primary separation locations for various x/L stations sensors as a function of angle of attack for steady flow.
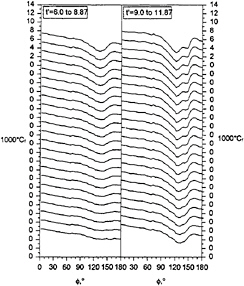
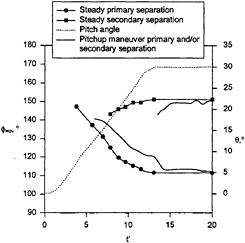
Figure 15. Separation position versus time for pitch-up maneuver at x/L=0.729 compared with quasi-steady separation positions.
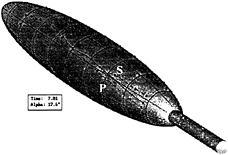
Figure 16. Comparison of steady and unsteady separation lines at α=17.6°. Dashed lines are equivalent steady separation lines, solid lines are instantaneous separation lines. “P” indicates primary separation, while “S” indicates secondary separation.

Figure 17. Submarine maneuver time development of Cf vs. ![]() for x/L=0.831.
for x/L=0.831.
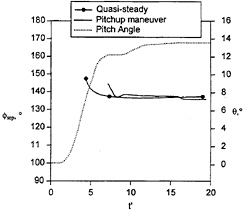
Figure 18. Separation position versus time for submarine maneuver at x/L=0.729 compared with quasi-steady separation positions.
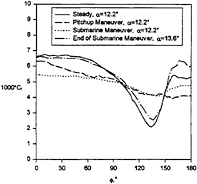
Figure 19. Comparison of wall shear distribution at x/L=0.729 for steady data, pitchup maneuver, and submarine maneuver at α=12.2°.
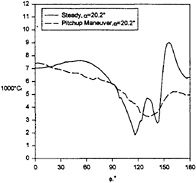
Figure 20. Comparison of wall shear distribution at x/L=0.729 for steady data and pitchup maneuver at α=20.2°.
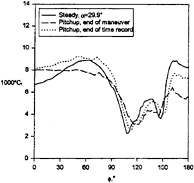
Figure 21. Comparison of wall shear distribution at x/L=0.729 for steady data and pitchup maneuver at α=29.9°.
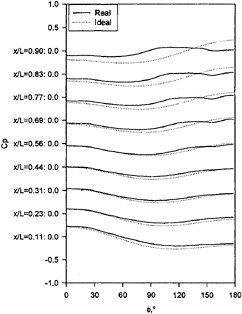
Figure 22. Steady Cp vs. ![]() for all x/L, α=14.9°. Solid lines are measurements, while dotted lines are potential flow results.
for all x/L, α=14.9°. Solid lines are measurements, while dotted lines are potential flow results.
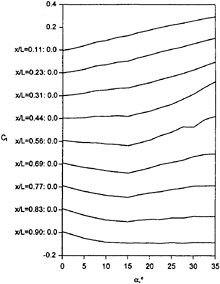
Figure 23. Steady sectional lift coefficients versus angle of attack for all x/l.
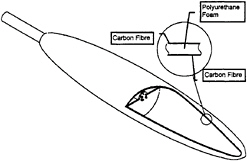
Figure 24. Lightweight model construction.
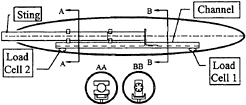
Figure 25. Two point balance.